基本使用-UI使用
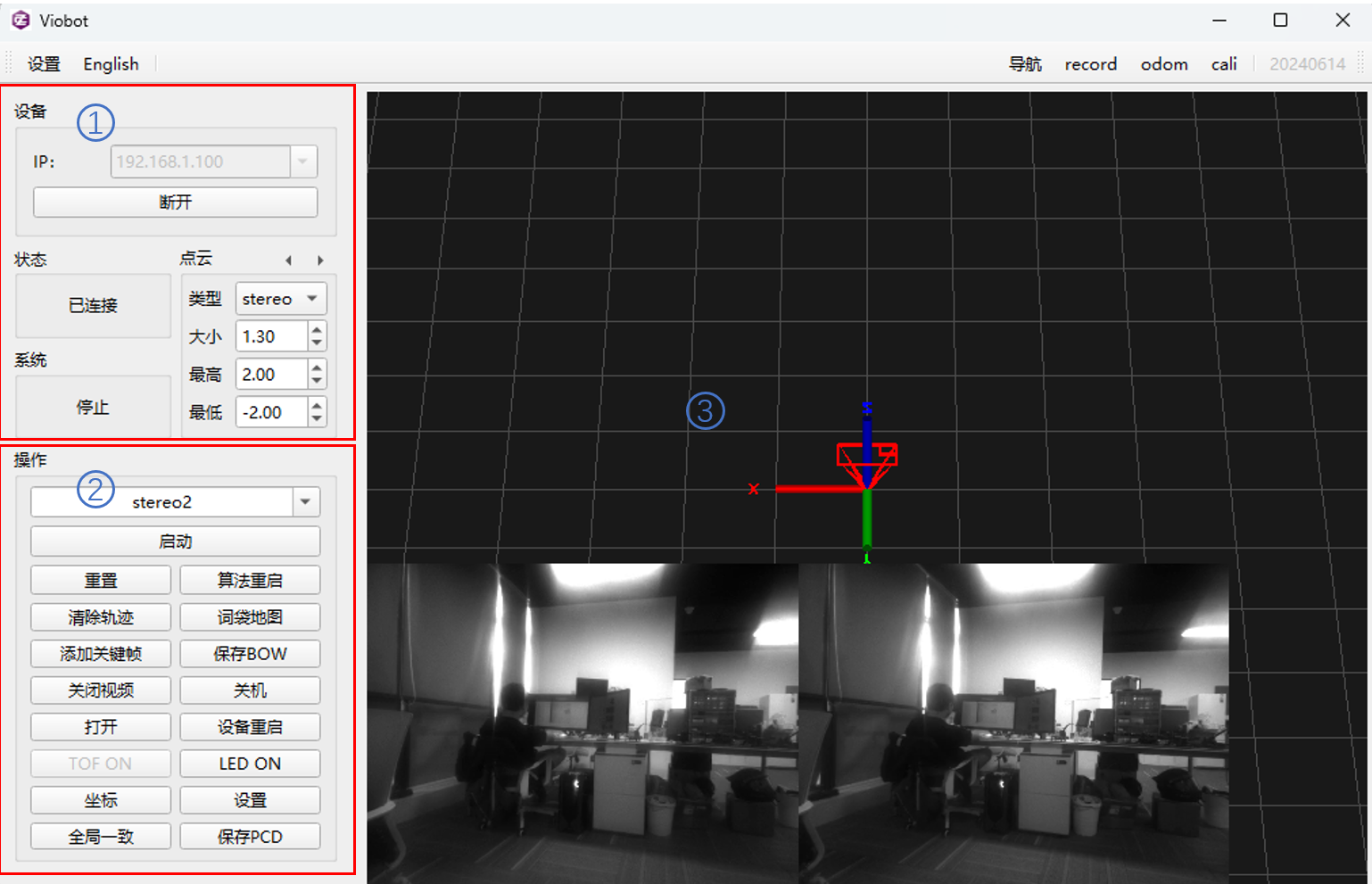
区域1.状态栏和可视化设置
IP选择:选择设备的IP
连接/断开:连接设备和断开设备连接
状态:设备连接状态,分别为未连接和已连接
系统:
- 算法运行的6种状态,分别是停止,mono1初始化中/运行中,stereo1运行中,stereo2运行中和stereo3运行中
点云:
- 类型指点云显示类型的选择,分别是stereo、tof和rdf三种。 stereo点云对应算法的原生输出点云,rdf点云对应滤波后的点云,tof点云只有TOF版本有
- 大小指显示时点云中点的大小
- 最高和最低指点云显示的范围(主要是Z轴上面的范围)
区域2.操作面板
算法选择:
- 四种SLAM算法,分别是mono1、stereo1、stereo2和stereo3。mono1是一个单目的测试例程,用于测试。stereo1是一个双目的测试例程,已被弃用。stereo2是长期维护并更新升级的SLAM算法。sstereo3算法还在内部测试中,尚未开放
启动/停止:启动/停止选中的算法,启动后上面的系统状态会更新到相应的状态
重置:重置设备当前位姿,但不清除词袋信息,当设备触发词袋回环时,仍可重定位到之前词袋记录的位姿
算法重启:重启整个算法,并清除之前记录并加载在算法的词袋信息,词袋会重新开始记录
清除轨迹:清除UI当前显示的轨迹和点云
词袋地图:读取已经保存好的词袋地图,在UI上面显示关键帧位姿
添加关键帧:手动添加一帧关键帧到词袋里面
- 自动关键帧的选择逻辑:图像本身的特征差别达到阈值
保存BOW:将本次运行生成的词袋地图保存到指定路径。保存路径可在设置页面中更改
关闭视频:关闭视频流
关机:程序关机(非硬件关机),内部调试升级用
打开:打开设备的文件服务器,install文件夹中是配置文件、库文件和执行文件
- 账号:root
- 密码:PRR
设备重启:重启设备,用于一些配置项修改重启
TOF ON/TOF OFF:打开,关闭TOF
LED ON/LED OFF:打开,关闭补光灯
坐标:显示设备当前的位姿
设置:打开设置页面
全局一致:在当前时刻对历史轨迹进行全局一致计算,得到更精准的位姿和rdf点云信息(如果历史轨迹很多,则需要一定的计算时间)
保存PCD:保存生成的全局一致点云,目前只支持保存在 home 目录的文件夹下
区域3.可视化区域
主要显示三维空间坐标系,设备算法生成的轨迹和点云等
- 当算法未启动时,会显示设备左,右目原始灰度图像的视频流
- 当算法启动时, 会显示叠加了梯度点的视频流

设置页面
点击设置页面,会弹出一个小窗口,对应五个标签栏
network:配置设备网络的ip、子网掩码、网关地址,更改配置后点击确定并重启设备生效
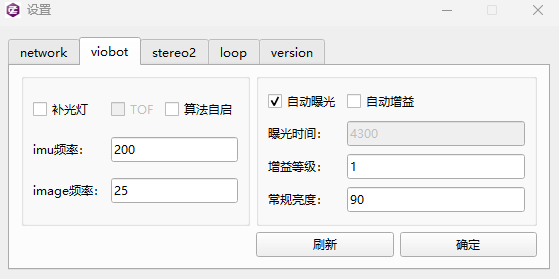
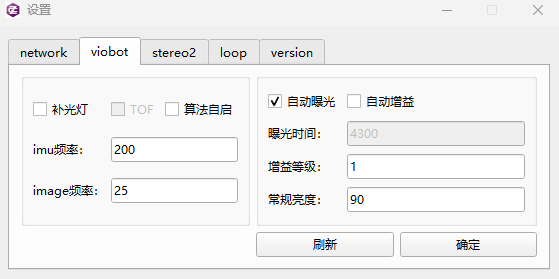
viobot:配置设备硬件相关参数
补光灯:设备上电后会开启补光灯算法自启:设备上电后自动开启算法imu频率:默认200Hz,最高支持400Hz,没有特殊需求一般不建议修改image频率:基础版兼顾开销最好的是15fps,PRO版25fps自动曝光:设备上电后自动开启曝光。根据设置的常规亮度来调节相机的成像亮度。如果不需要自动曝光,则可以单独设置曝光时间自动增益:设备上电后自动开启增益。在场景特别暗的时候好用,但在一般场景下,开启自动增益可能会影响算法精度曝光时间:在非自动曝光情况下,可以自行根据不同设置值下的成像表现来设置,属于经验值。调大图片会变亮,调小会变暗,取值范围:1~65535增益等级:在非自动增益情况下,推荐设置为1,如果画面太暗,效果不佳可设置为2常规亮度:根据画面亮度手动调节。推荐室内:8095;室外:120135;
注:常规亮度和增益等级根据场景光照情况进行调整(默认室内场景不调整,场景变暗,常规亮度要调小,增益等级要调大)
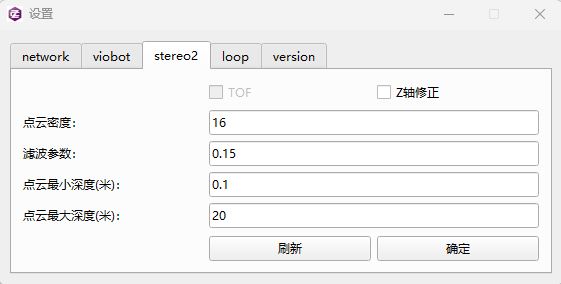
stereo2:用于配置算法
Z轴修正:Z轴漂移补偿的开关
- 当运行环境比较平整,没有太大的上下坡度时候可以开启,开启后算法会将Z轴的漂移量跟XY的平移量做整合,得到一个没有Z轴漂移的位姿
点云密度:pro版默认设置为16,基础版默认为32
滤波参数:用来过滤点云中的孤立点,建议0.15,单位m
点云最小深度:0.1以内的点深度准确性变低,不建议设置更小的值,设置大点的值可以屏蔽一些特别近的噪点,单位m
点云最大深度:室外大场景可以设置为100,室内默认20~35即可,单位m
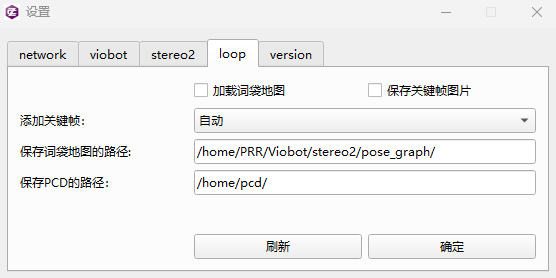
loop:用于配置回环
加载词袋地图:勾选会自动加载词袋地图保存关键帧图片:调试用。勾选会保存所有关键帧的图片,会占用太多磁盘空间添加关键帧:可配置为自动或手动,一般设置为自动。设置为手动时,如果没有手动添加关键帧,则可以屏蔽掉回环的影响。保存词袋地图路径:设置保存词袋地图的路径。注意:该路径是在设备上的保存PCD路径:设置保存点云的路径,目前只支持保存在home目录的文件夹下
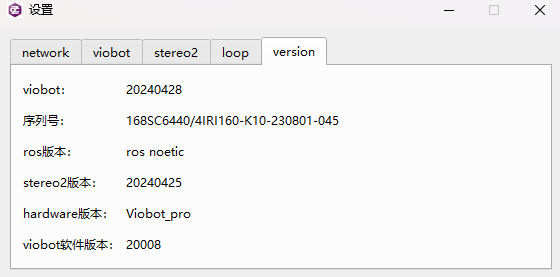
version:记录了设备的基本信息和程序版本