基本使用-VIOBOT上电测试
1.上电
给设备接上电源(12V),并用网线连接电脑和设备。
2.配置网络
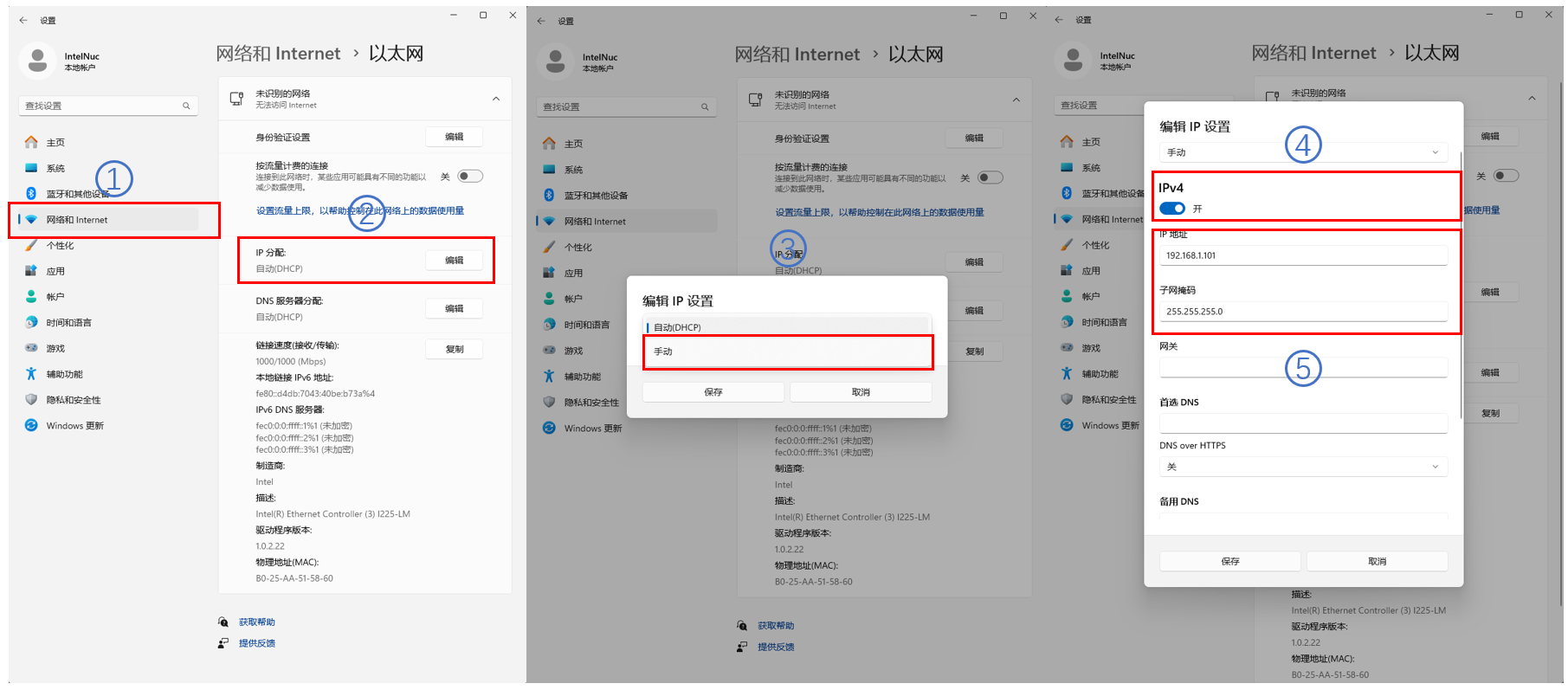
2.1 为了能够让上位机连接VIOBOT进行数据传输 ,需要对电脑的以太网口IP进行设置。VIOBOT默认IP是192.168.1.100,那可以把本地电脑的IP设置为192.168.1.xxx,如192.168.1.101 (不要把电脑IP设置成设备的IP,防止冲突)。
以Win11系统为例,在搜索栏中搜索设置,然后按照下图进行配置
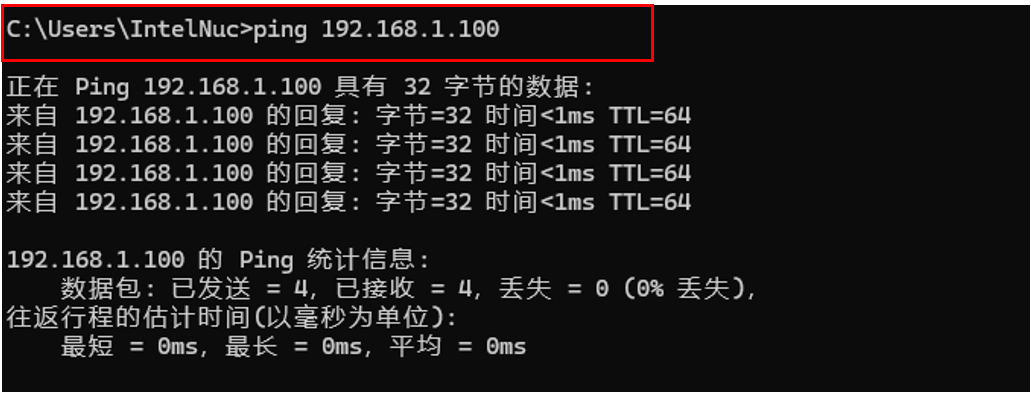
2.2 搜索电脑的“命令提示符”窗口,输入命令ping 192.168.1.100测试是否能够与VIOBOT建立连接。
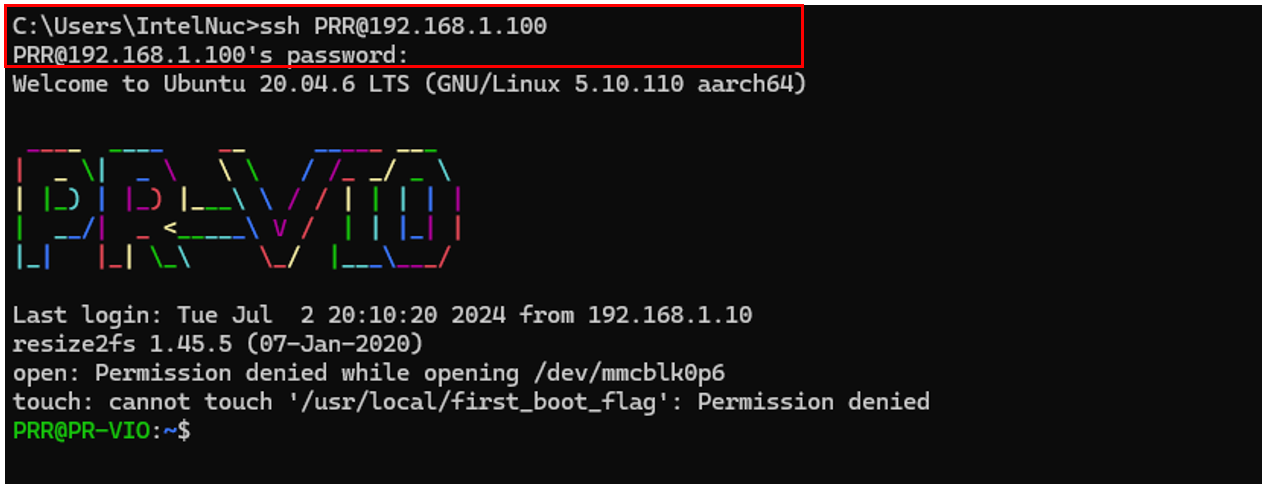
2.3 通过SSH远程连接VIOBOT,输入命令ssh PRR@192.168.1.100。其中PRR是设备系统的用户名,192.168.1.100是设备IP。并输入密码PRR。
3. 连接设备,启动算法
3.1 启动UI,点击IP栏的下拉选择按钮后,UI会自动搜索局域网内的设备IP,然后点击连接。
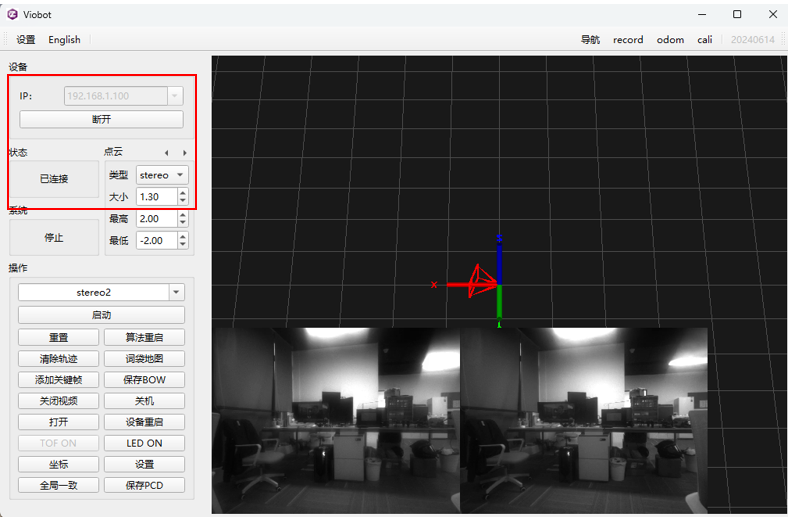
连接成功后,状态栏会变成“已连接”,移动设备,左下角的双目视频流会刷新。
3.2 选择stereo2算法启动。
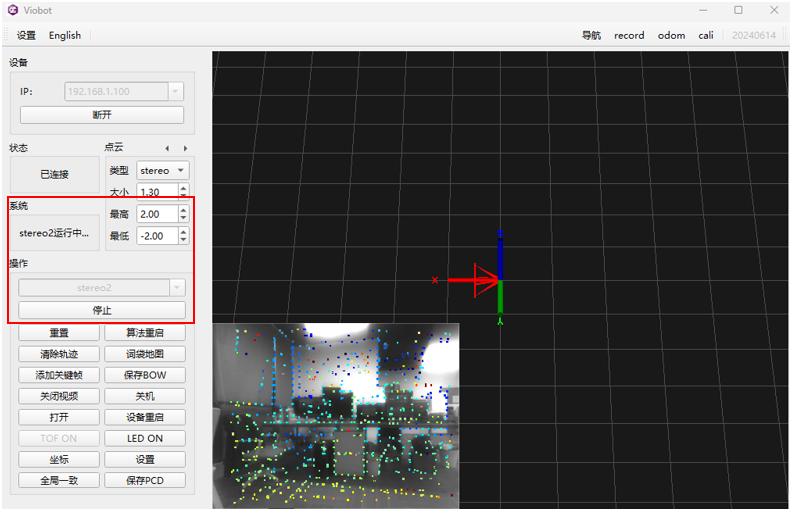
算法启动成功后,系统栏会变成“stereo2运行中”,左下角的双目视频流会变成带梯度点的单目视频流 (梯度点由近到远颜色次序是:红橙黄绿青蓝紫),可以通过这个视频流看到算法的表现,如果图片上的点基本符合上述颜色次序,则运行正常,少量的错点可忽略。如果刚启动的时候有很多错点,可以稍微挪动一下设备,更新关键帧,即可恢复正常。
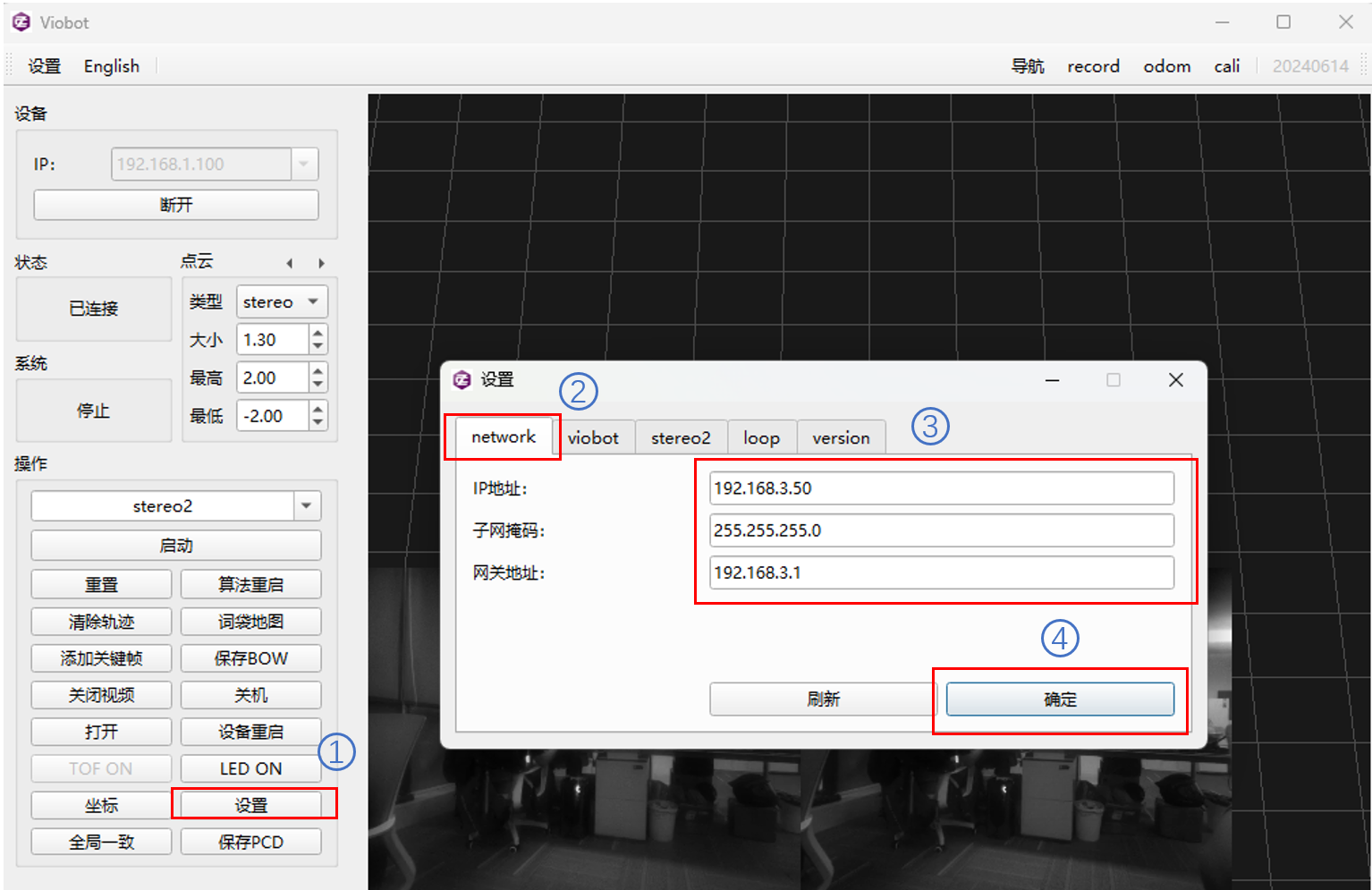
4.修改设备IP
如果设备的默认IP被其他电脑占用时,需要修改IP。修改IP后,重启设备即可生效。
注:设备直连电脑能够通过上位机自动搜索到设备IP( 可以用于忘记IP的情况)。但还是要确保电脑的IP网段与设备一致,否则上位机连接不上设备。
5.设备坐标系定义
stereo2算法开启后,会自动完成双目初始化。算法输出的里程计坐标系为X轴朝前,Z轴朝上,Y轴朝左。相机原点归到左目上面。 点云坐标系与里程计的一致。
注:算法输出的第一帧不是单位阵。算法启动后,将相机对准里程计坐标系的Z轴正方向,然后绕里程计坐标系的Z轴逆时针旋转90°,此时才是单位阵。