请输入
菜单
Mavlink消息与Mavros话题(GPS相关)
下载
Mavlink消息与Mavros话题(GPS相关)
本篇梳理一下在户外使用PX4飞控时,与GPS定位相关的Mavlink消息与Mavros话题
参考资料
- Mavlink消息原始定义:https://mavlink.io/en/messages/common.html
- Mavros源码:
- 相关的plugin有:global_position.cpp、gps_status.cpp
- 建议通过AI搜索了解什么是WGS84坐标系、ENU坐标系以及其转换关系如何构建等基本概念
枚举类型 - GPS_FIX_TYPE
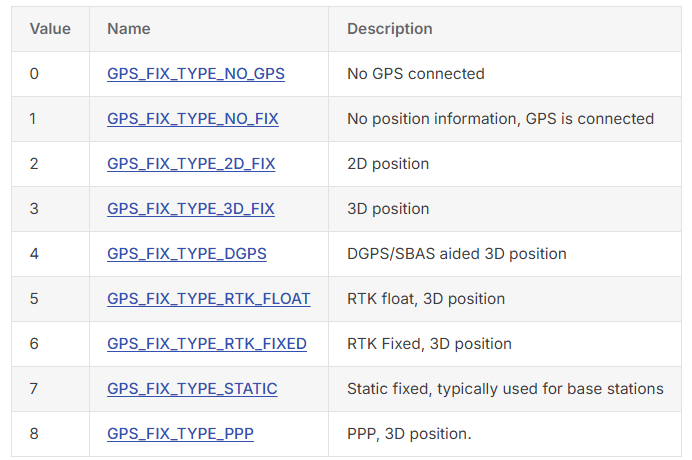
- 简单来说,这个枚举值要大于等于3,否则认为GPS无效
原始GPS数据 - GPS_RAW_INT (#24)
- 顾名思义是从GNSS模块获得的原始数据
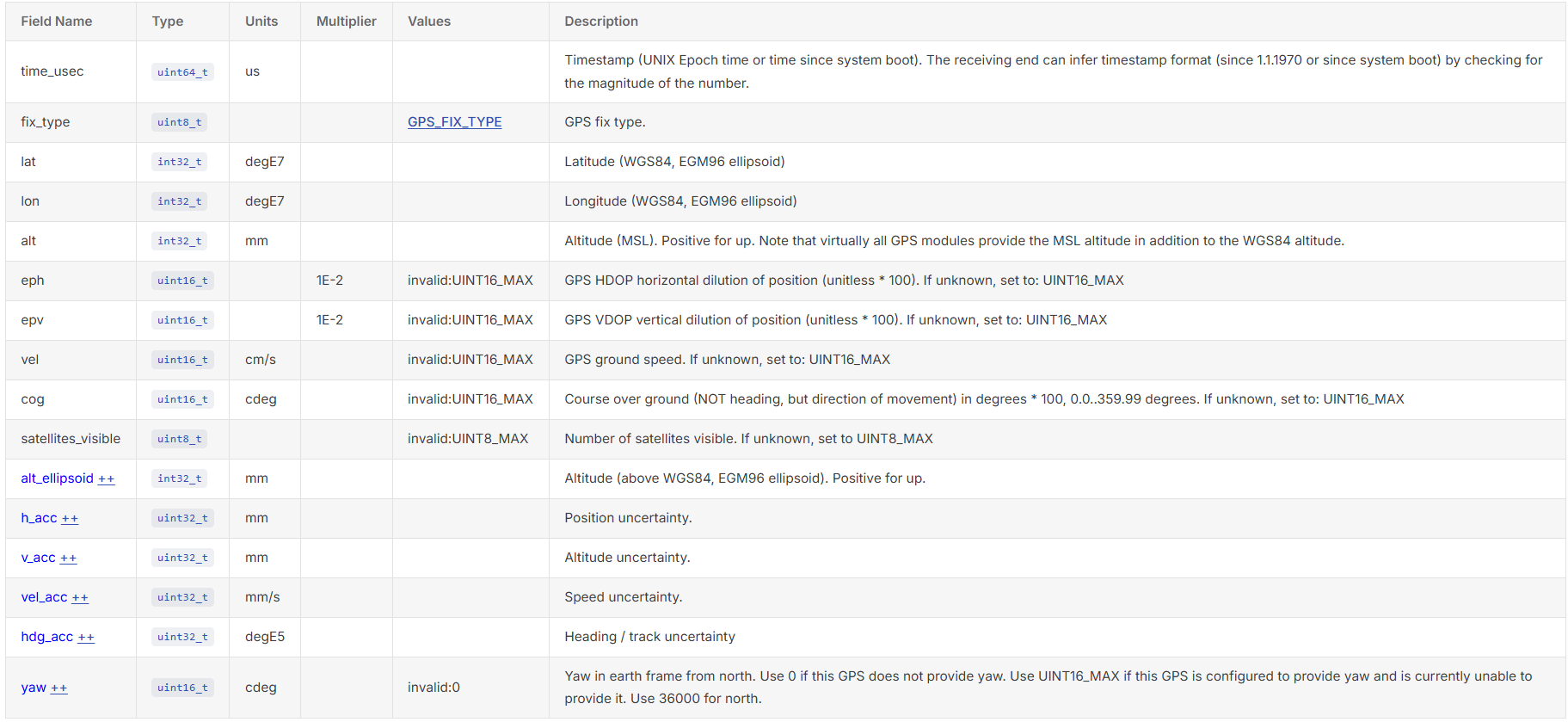
-
global_position.cpp中对这个Mavlink消息进行了解析处理,发布了如下话题:
- 经纬度:
mavros/global_position/raw/fix,话题类型为sensor_msgs::NavSatFix - 速度:
mavros/global_position/raw/gps_vel,话题类型为geometry_msgs::TwistStamped - 搜星数:
mavros/global_position/raw/satellites,话题类型为std_msgs::UInt32
- 经纬度:
-
gps_status.cpp中对这个Mavlink消息进行了解析处理,发布了如下话题:
- 经纬度:
mavros/gpsstatus/gps1/raw,话题类型为mavros_msgs::GPSRAW>
- 经纬度:
GPS状态 - GPS_STATUS (#25)
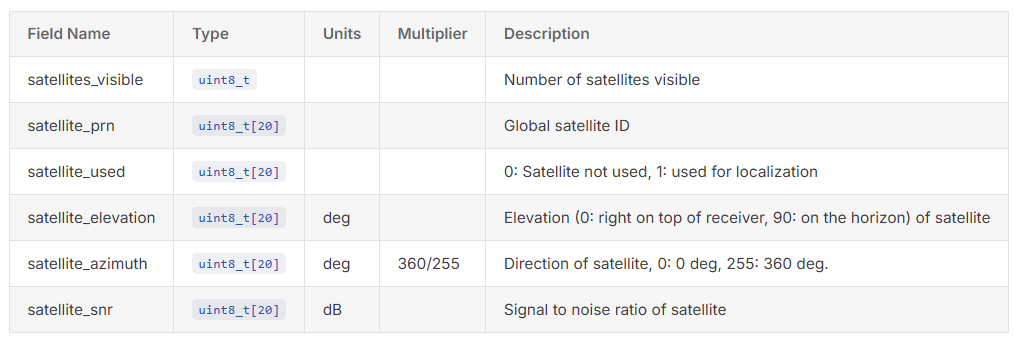
- 没有相关的Mavros处理函数
GPS融合后的信息 - GLOBAL_POSITION_INT (#33)
The filtered global position (e.g. fused GPS and accelerometers). The position is in GPS-frame (right-handed, Z-up). It is designed as scaled integer message since the resolution of float is not sufficient.
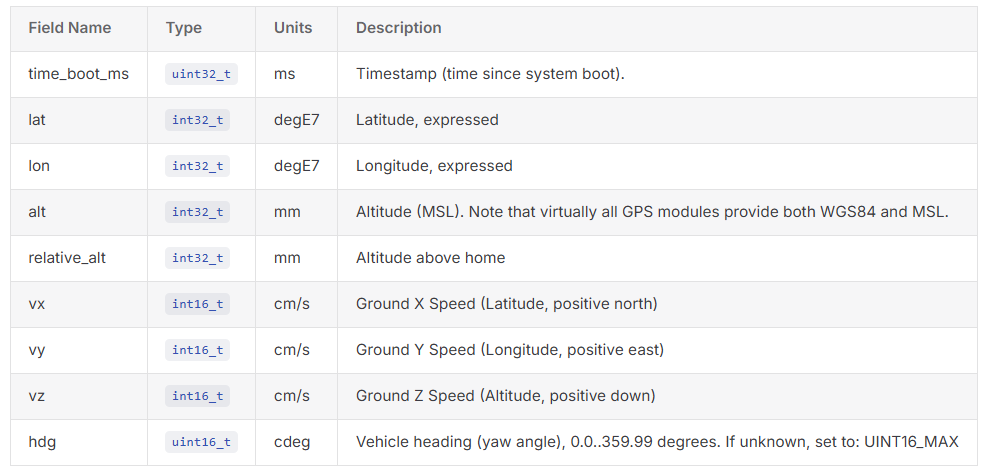
- global_position.cpp中对这个Mavlink消息进行了解析处理,发布了如下话题:
- 经纬度:
mavros/global_position/global,话题类型为sensor_msgs::NavSatFix(重要!) - 位置+速度:
mavros/global_position/local,话题类型为nav_msgs::Odometry- 这个是原始数据中没有的,是Mavros解算出来的ENU坐标。具体如何解算?
- 相对高度:
mavros/global_position/rel_alt,话题类型为std_msgs::Float64 - 航向角:
mavros/global_position/compass_hdg,话题类型为std_msgs::Float64
- 经纬度:
GPS原点坐标 - GPS_GLOBAL_ORIGIN (#49)
Publishes the GPS coordinates of the vehicle local origin (0,0,0) position. Emitted whenever a new GPS-Local position mapping is requested or set - e.g. following SET_GPS_GLOBAL_ORIGIN message.

- global_position.cpp中对这个Mavlink消息进行了解析处理,发布了如下话题:
- 经纬度:
mavros/global_position/gp_origin,话题类型为geographic_msgs::GeoPointStamped
- 经纬度:
上一个
Mavlink消息与Mavros话题
下一个
Mavlink消息与Mavros话题(位置控制&姿态控制相关)
最近修改: 2025-09-27
大纲