请输入
菜单
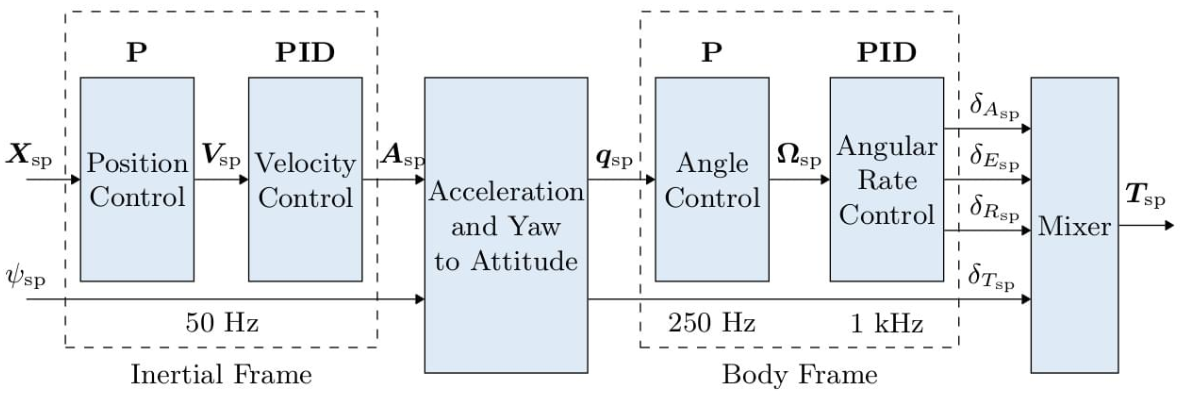
位置控制与姿态控制架构
下载
本文介绍PX4开源飞控中多旋翼无人机的控制框架
参考链接:https://docs.px4.io/main/en/flight_stack/controller_diagrams.html
- PX4使用标准的串级控制架构(cascaded control)
- 位置和姿态控制器是P和PID控制器的混合控制方式
- 控制器的估计值(如当前位置、速度、姿态等)来自PX4内部的EKF2模块
- 根据PX4飞行模式的不同,外部(位置)控制环路可能会被绕过。
位置环控制器
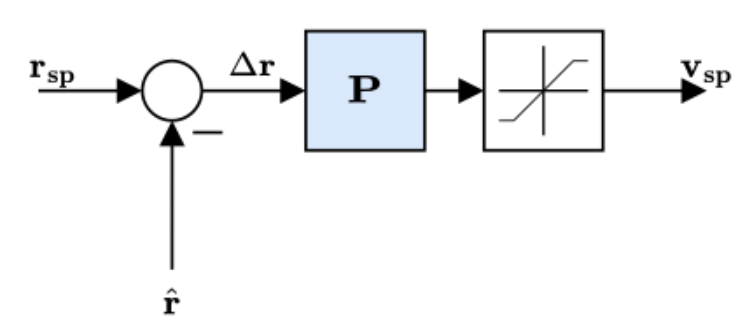
- 通过参数
MPC_XY_VEL_MAX来限制速度设定值(仅针对水平速度); - 但是需要区别
MPC_XY_VEL_MAX和MPC_XY_CRUISE(autonomous modes) 、MPC_VEL_MANUAL(manual position control mode)这两个参数;
速度环控制器
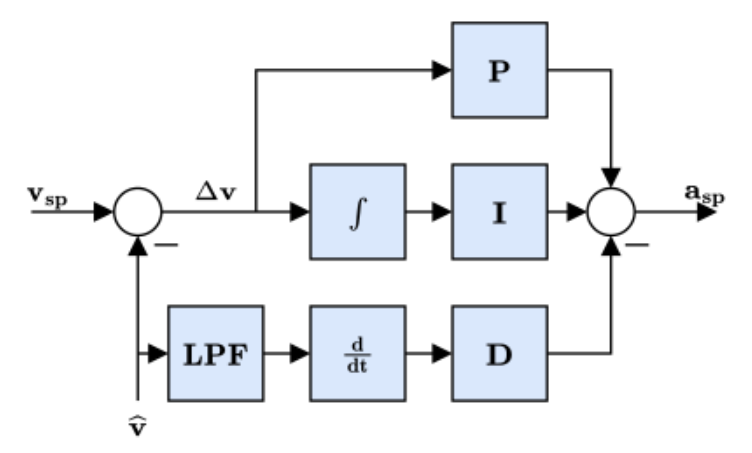
- 速度环控制器用于速度追踪控制,输出指令为加速度设定值;
- 加速度设定值不会进行限幅,而是通过后续的最大倾斜角度(maximum tilt angle)来进行限制;
加速度设定值->推力和姿态设定值的转换关系
- 加速度设定值(setpoint)是速度控制器的输出;
- 在计算相应的推力后进行推力饱和处理:
- 计算所需的垂直推力(
thrust_z) - 通过参数
MPC_THR_MAX来限制thrust_z - 通过参数
(MPC_THR_MAX^2 - thrust_z^2)^0.5来限制thrust_xy
- 计算所需的垂直推力(
- 实现细节可以在
PositionControl.cpp和ControlMath.cpp中找到。
角度环控制器
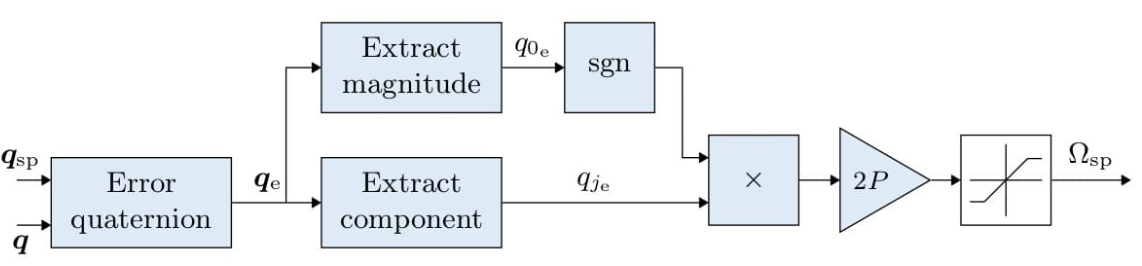
- 角度环控制器是基于四元数编程的;
- 控制器理论可以参考论文;
- 如果需要进行参数调节,那只需要调整P增益;
- 输出给角速率环控制器的指令被经过一个限幅;
角速率环控制器
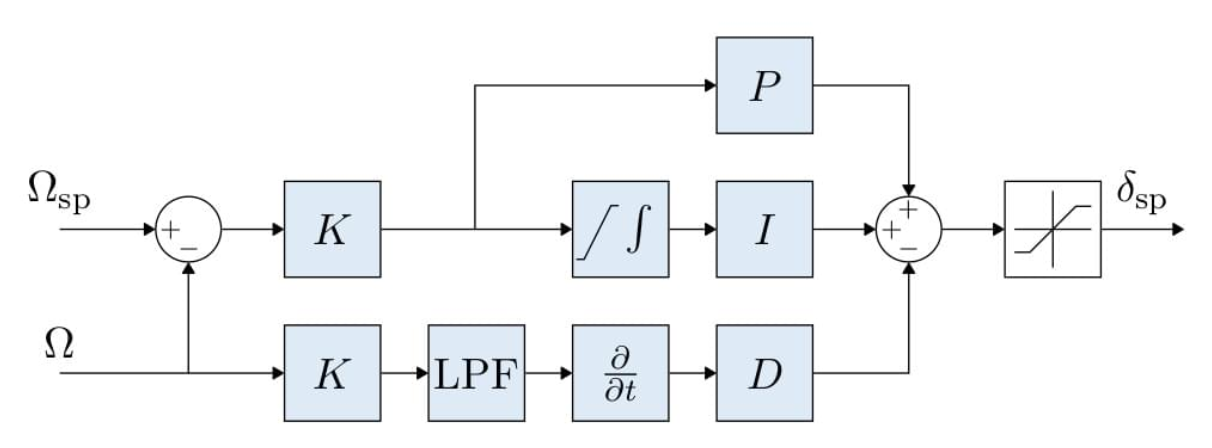
- 整体为K-PID控制器。有关参数调节的更多信息,请参阅速率控制器;
- K是一个整体增益调节参数;
- 在积分环节中,有一个积分限幅,防止wind up现象;
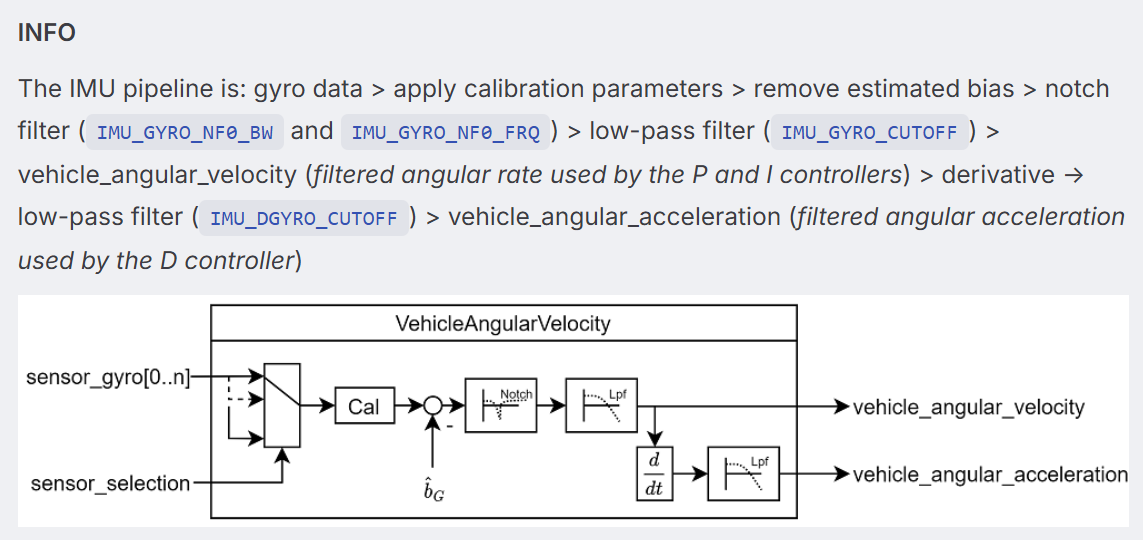
- 在微分环节中,加入了一个低通滤波器(LPF)来降低噪声;
- 控制器最后有一个整体限幅(在控制分配模块中),通常为-1和1;
上一个
PX4系统架构
下一个
PX4仿真
最近修改: 2025-02-14
大纲