请输入
菜单
PX4系统架构
下载
以下部分提供了两个“典型”PX4系统的PX4硬件和软件栈的高级概述;一个只有飞行控制器,另一个有飞行控制器和配套计算机(也称为“任务计算机”)。
仅有飞控
下图提供了一种基于飞行控制器的最简PX4系统的概述。
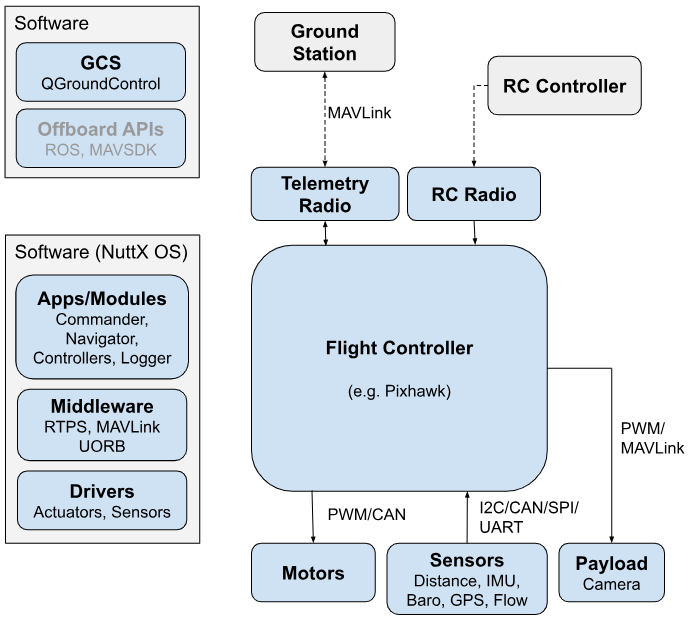
硬件由以下部分组成
- 飞行控制器(运行PX4飞行堆栈),飞控中包括内部IMU、磁罗盘和气压计;
- 电机通过电调连接到飞控的PWM输出;
- 传感器(GPS、距离传感器、光流等),可以通过I2C、SPI、CAN、UART等接口与飞控连接;
- 摄像头或其他有效载荷,摄像头可以连接到PWM直接输出或通过MAVLink连接控制;
- 用于连接地面站计算机/软件的数传系统(Telemetry Radio);
- 遥控器(RC Radio)
飞控与机载电脑
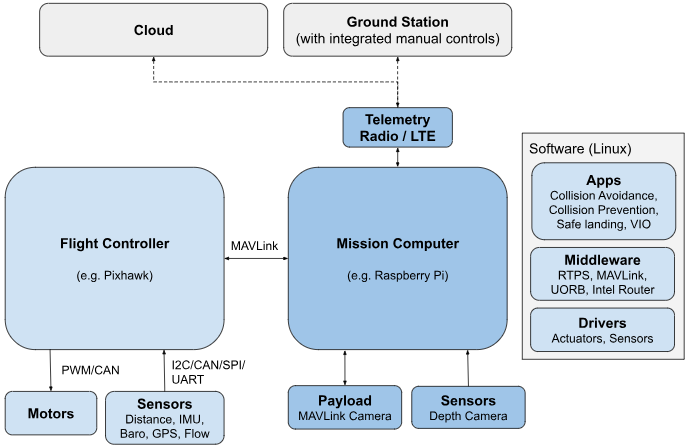
- 飞行控制器运行正常的PX4飞行堆栈,而机载电脑负责基于计算机视觉的高级功能。这两个系统使用串口或者IP链路进行连接,通常使用MAVLink协议进行通信。
- 机载计算机上一般运行Linux操作系统。Linux是比NuttX更好的“通用”软件开发平台;有更多的Linux开发人员,并且已经编写了许多有用的软件(例如用于计算机视觉、通信、云集成、硬件驱动程序)。有的时候,配套电脑有时会运行Android系统。
上一个
在Ubuntu中编译PX4源码
下一个
位置控制与姿态控制架构
最近修改: 2025-02-13
大纲