请输入
菜单
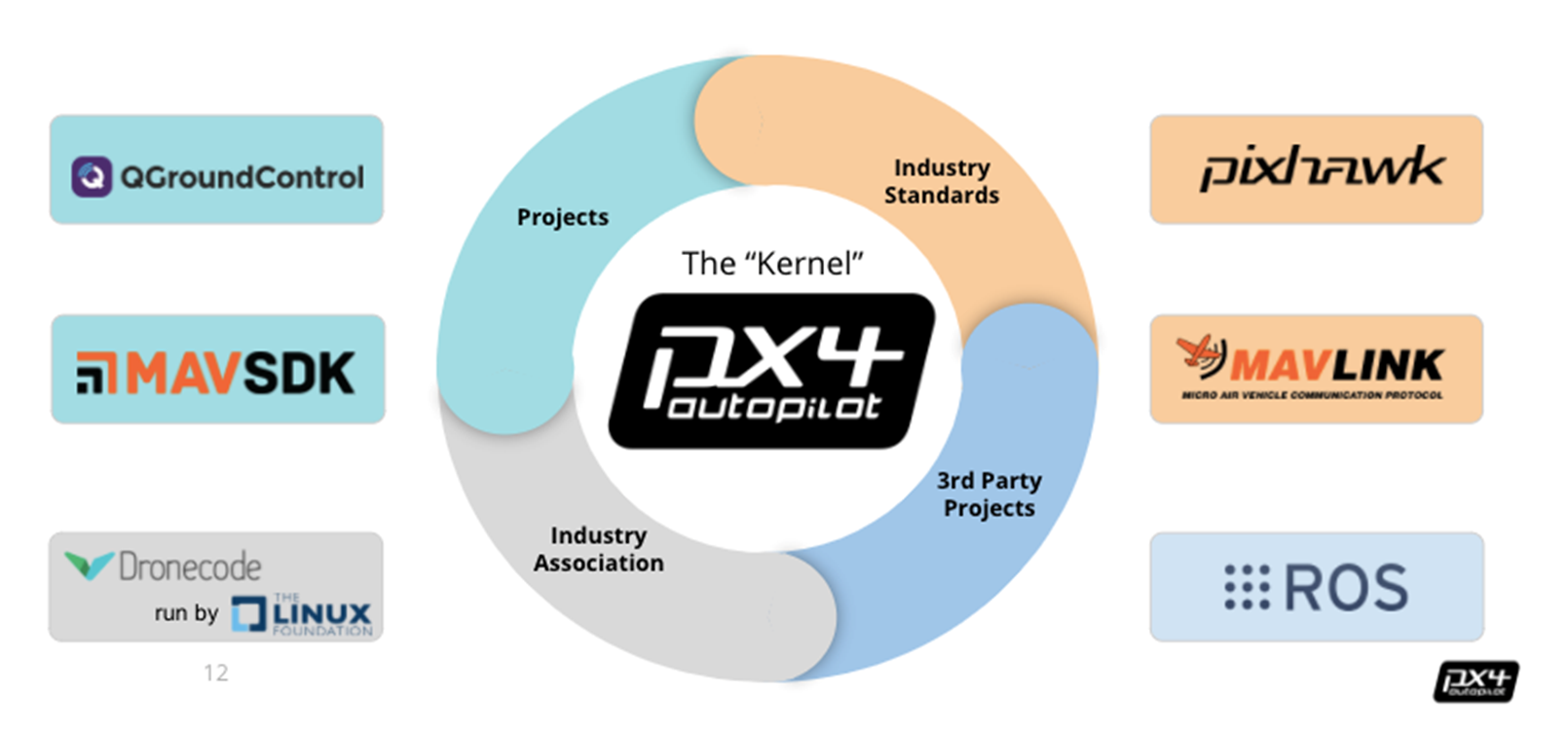
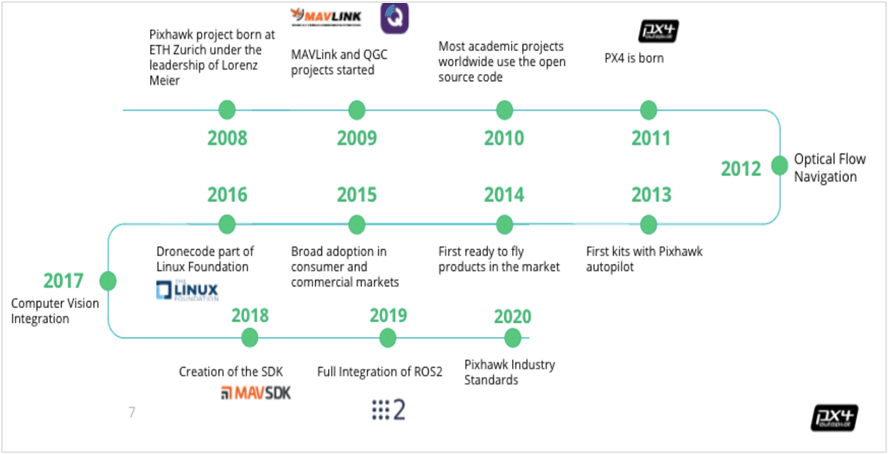
PX4开源生态
下载
PX4开源生态以PX4自驾仪为核心,包括Pixhawk、MAVLink、QGroundControl等开源配套组成。
PX4飞行控制栈
PX4是用于无人机的开源飞行控制软件。该项目为无人机开发人员提供了一套灵活的工具,以共享技术,从而为无人机应用创建量身定制的解决方案。 PX4提供了提供无人机硬件支持和软件堆栈的标准,从而允许生态系统以可扩展的方式构建和维护硬件和软件。
- PX4 Github主页:https://github.com/PX4/Firmware
Pixhawk(PX4飞控硬件)
- Pixhawk是指飞控硬件
- Pixhawk硬件标准是开源的
Dronecode基金会
- PX4目前由Dronecode基金会管理,同时,Dronecode还托管QGroundControl,MAVLink等开源项目。
- Dronecode基金会是为开源无人机项目提供开源治理服务的机构。基金会注册于美国,隶属于Linux基金会的非盈利机构,支持PX4生态的可持续发展。
- 它的作用是开源治理,开源项目和行业标准的传播、推广、社区运营、以及举办每年的开发者大会。
- Dronecode基金会的会员来自于参与PX4生态系统建设的公司和组织。
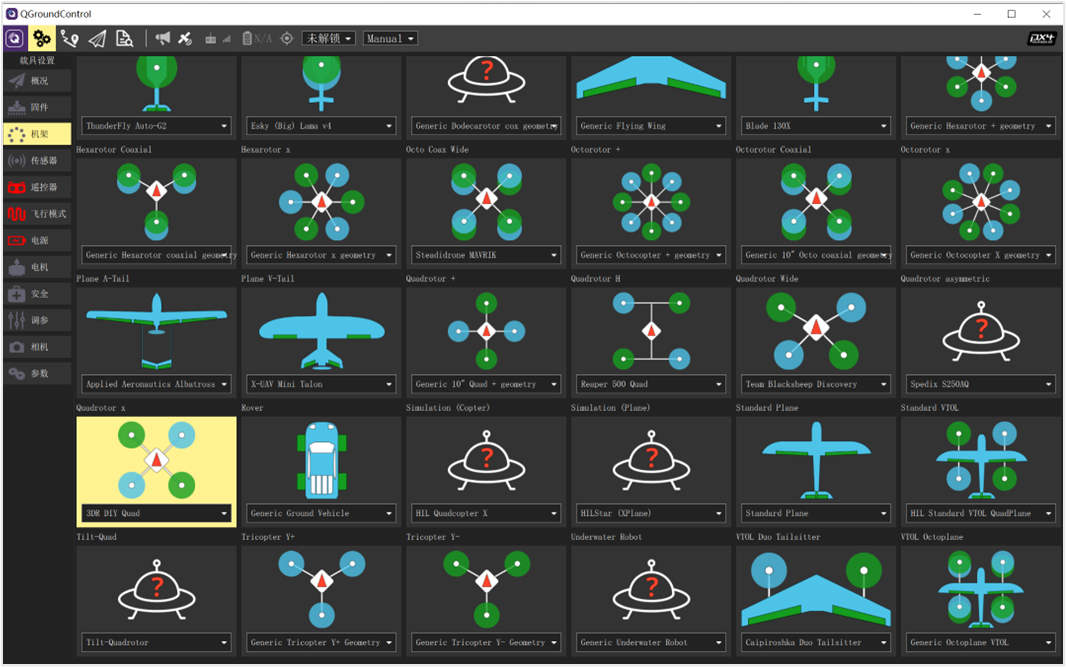
QGroundControl地面站
- QGroundControl通过MAVLink消息与飞控进行通信
- 免费使用且全开源,支持二次开发
MAVLink通信协议
- MAVLink全称是Micro Air Vehicle Message Marshalling Library,是一种轻量级的消息传输协议,用于无人机之间(或机载组件之间)的通信。
- MAVLink协议格式与PAYLOAD帧

- MAVLink 支持二次开发。MAVLink工具链可以通过指定的XML文件生成支持多种编程语言(C、C++、python,java等11种)的MAVLink库。常见的地面站(QGC、MP等)、飞控(PX4、APM等)及其他MAVLink系统(MAVROS、MAVSDK等)均是使用生成得到的MAVLink库进行的开发。MAVLink及其相关源码均遵循MIT协议,即可以无限制的在闭源应用中使用。
上一个
PX4开源飞控
下一个
PX4多旋翼无人机飞行模式(Flight Mode)
最近修改: 2025-03-22
大纲