请输入
菜单
PX4开发环境配置
下载
本篇内容:基于ubuntu20.04 搭建PX4仿真环境
操作前准备:1:ubuntu20.04 2:ROS1
PX4源码配置
Sunray_px4是 PX4 v1.15.2版本的本地化仓库,也可以使用官方仓库:PX4-Autopilot
## 拉取px4仓库
git clone https://gitee.com/yundrone_sunray2023/sunray_px4.git
## 进入文件夹
cd sunray_px4
## 拉取子模块
git submodule update --init --recursive
## 安装依赖包 受网络原因肯能会失败多试几次
./Tools/setup/ubuntu.sh
## 编译仿真
make px4_sitl_default gazebo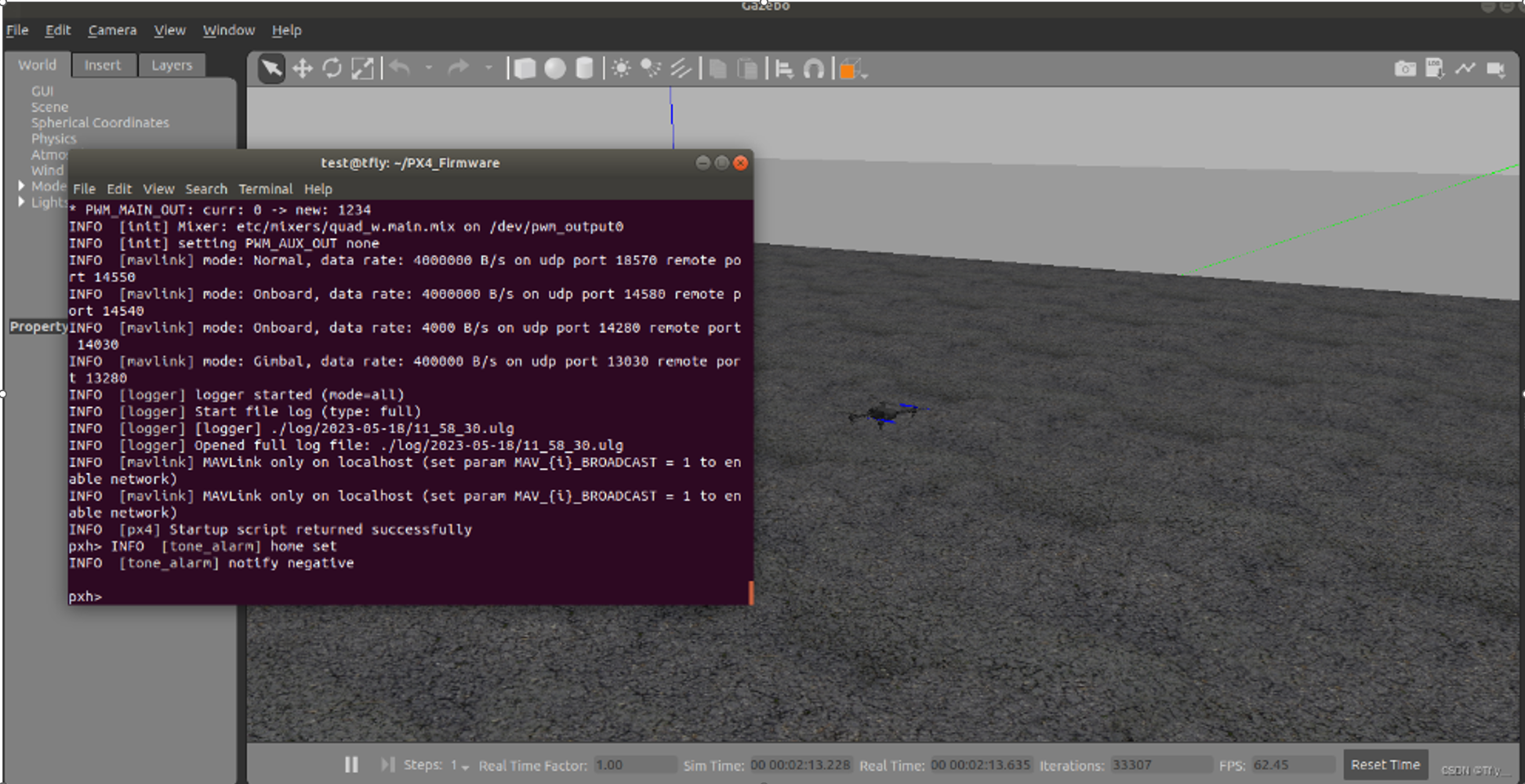
失败的可能原因
- 编译失败可能原因:缺少相关ros包、依赖没有安装等等
- 解决方法:安装对应的ros包、清除仓库重来等
配置环境变量
## 打开环境变量
vim ~/.bashrc
追加以下内容
source ~/sunray_px4/Tools/simulation/gazebo-classic/setup_gazebo.bash ~/sunray_px4 ~/sunray_px4/build/px4_sitl_default
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/sunray_px4/Tools/simulation/gazebo-classic/sitl_gazebo-classic
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/sunray_px4安装MAVROS
- 使用二进制方式安装
sudo apt-get install ros-noetic-mavros* - 安装GeographicLib (mavros的依赖库)
sudo /opt/ros/noetic/lib/mavros/install_geographiclib_datasets.sh- 这一步由于网络问题,安装时间会比较长,请耐心等待
- 如果安装失败,可参考如下教程install_geographiclib_datasets.sh
上一个
Sunray仿真开发环境配置
下一个
在windows中使用虚拟机的方式安装Ubuntu系统
最近修改: 2025-04-03
大纲