请输入
菜单
实验 - 使用智群地面站控制RMTT无人机
下载
实验 - 使用智群地面站控制RMTT无人机
- 确保所有准备工作做完且正确之后,在 开发主机中依次启动:
步骤1: 启动 ROS Master
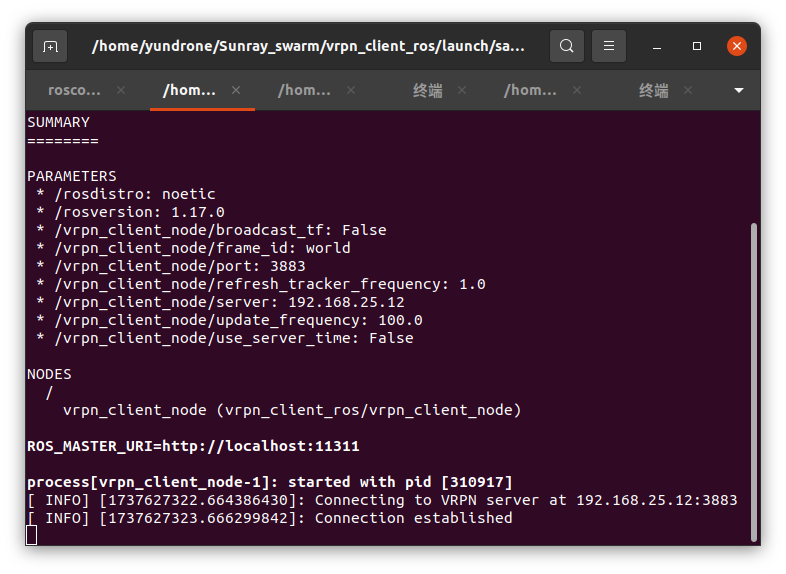
roscore步骤 2: 启动 vrpn_client_node 节点
roslaunch vrpn_client_ros sample.launch注意:参数
server是动捕主机的IP,请查看动捕主机IP后进行修改
XML
<launch>
<arg name="server" default="192.168.31.163"/>
<node pkg="vrpn_client_ros" type="vrpn_client_node" name="vrpn_client_node" output="screen">
<rosparam subst_value="true">
server: $(arg server)
port: 3883
update_frequency: 100.0
frame_id: world
# Use the VRPN server's time, or the client's ROS time.
use_server_time: false
broadcast_tf: true
# Must either specify refresh frequency > 0.0, or a list of trackers to create
refresh_tracker_frequency: 1.0
#trackers:
#- FirstTracker
#- SecondTracker
</rosparam>
</node>
</launch>- 下图为正常运行
步骤 3: 无人机IP扫描
-
在启动无人机驱动节点前需要扫描RMTT无人机的IP,使用脚本进行获取无人机SN以及IP。(这一步每次都要做是因为RMTT无人机连接路由器每次被分配的IP没法被固定,即使设置了静态IP也不行)
-
generate_launch.py文件说明:文件中local_ip为本机IP,SN_LIST中存放了想扫描的RMTT无人机SN号,脚本会根据内置的RMTT无人机SN扫描同一局域网内的IP,并创建了一个名为rmtt_all_drone.launch文件,用于后续执行cd Sunray_swarm/sunray_swarm/launch_agent ## 6代表了本次扫描无人机的数量 ./generate_launch.py -n 6 -
如果扫描成功
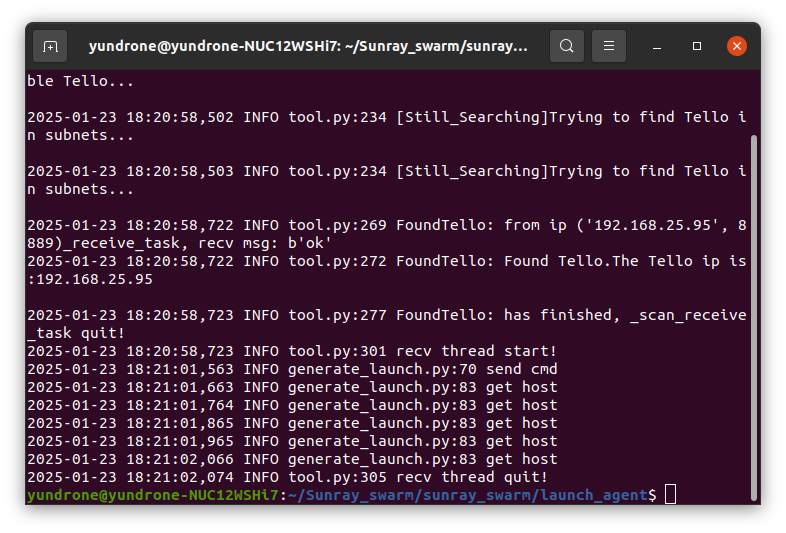
generate_launch.py
步骤 4: 启动无人机驱动节点 rmtt_driver 和无人机控制节点 rmtt_control
- 运行下述命令,确保没有报错
Bash
roslaunch sunray_swarm rmtt_all_drone.launch
步骤 5: 启动智群地面站软件
步骤 6: 在地面站中操控RMTT无人机起飞
-
在地面站看到RMTT无人机已连接,且能够刷新打印状态信息

RMTT无人机状态 -
点击单机起飞按钮即可起飞无人机,点击单机降落即可降落无人机
步骤 7: 在地面站中操控RMTT无人机移动
- 使用惯性系位置控制模块发布控制指令(注意不要超过地理围栏的边界值)
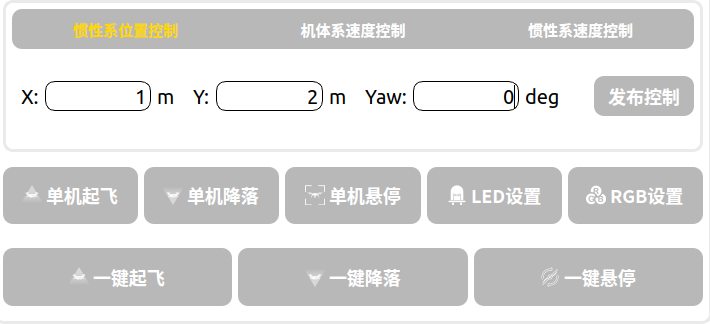
控制RMTT无人机移动到[1,2]坐标,偏航角为0度
上一个
准备工作 - 动作捕捉系统
下一个
实验 - 使用智群地面站控制无人车
最近修改: 2025-09-20
大纲