请输入
菜单
准备工作 - RMTT无人机
下载
准备工作 - RMTT无人机
配置RMTT连接路由器
-
RMTT无人机在发货时已完成所有配置工作,以下内容作为参考教程用于用户重新配置开发主机
-
RMTT无人机有两种工作模式,一种是作为热点(开发主机连接其WIFI,默认模式),二是可以设置RMTT无人机连接指定路由器
-
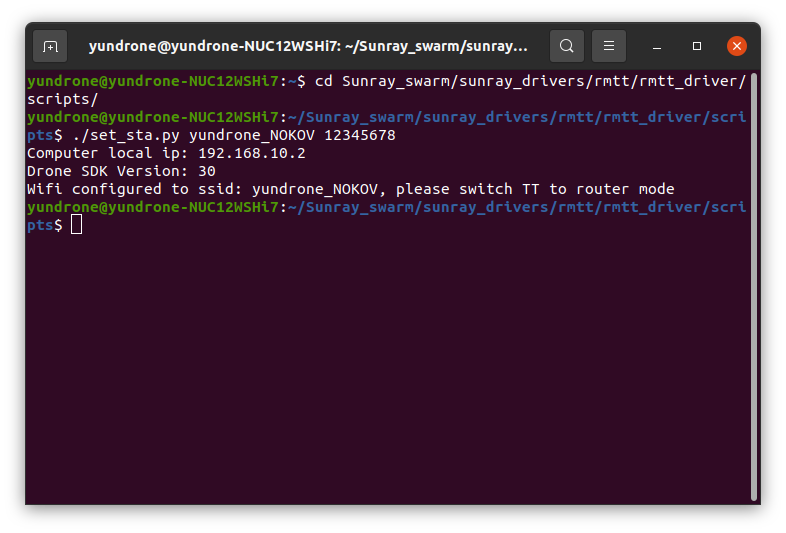
在默认模式时,使用开发主机连接每台RMTT无人机的热点,使用python脚本
set.sta.py设置RMTT无人机连接指定的路由器。- 其中
yundrone_NOKOV为wifi名称,12345678为密码
cd Sunray_swarm/sunray_drivers/rmtt/rmtt_driver/scripts/ ./set_sta.py yundrone_NOKOV 12345678 - 其中
最近修改: 2025-07-01
大纲