请输入
菜单
Sunray_swarm代码架构
下载
Sunray_swarm代码架构
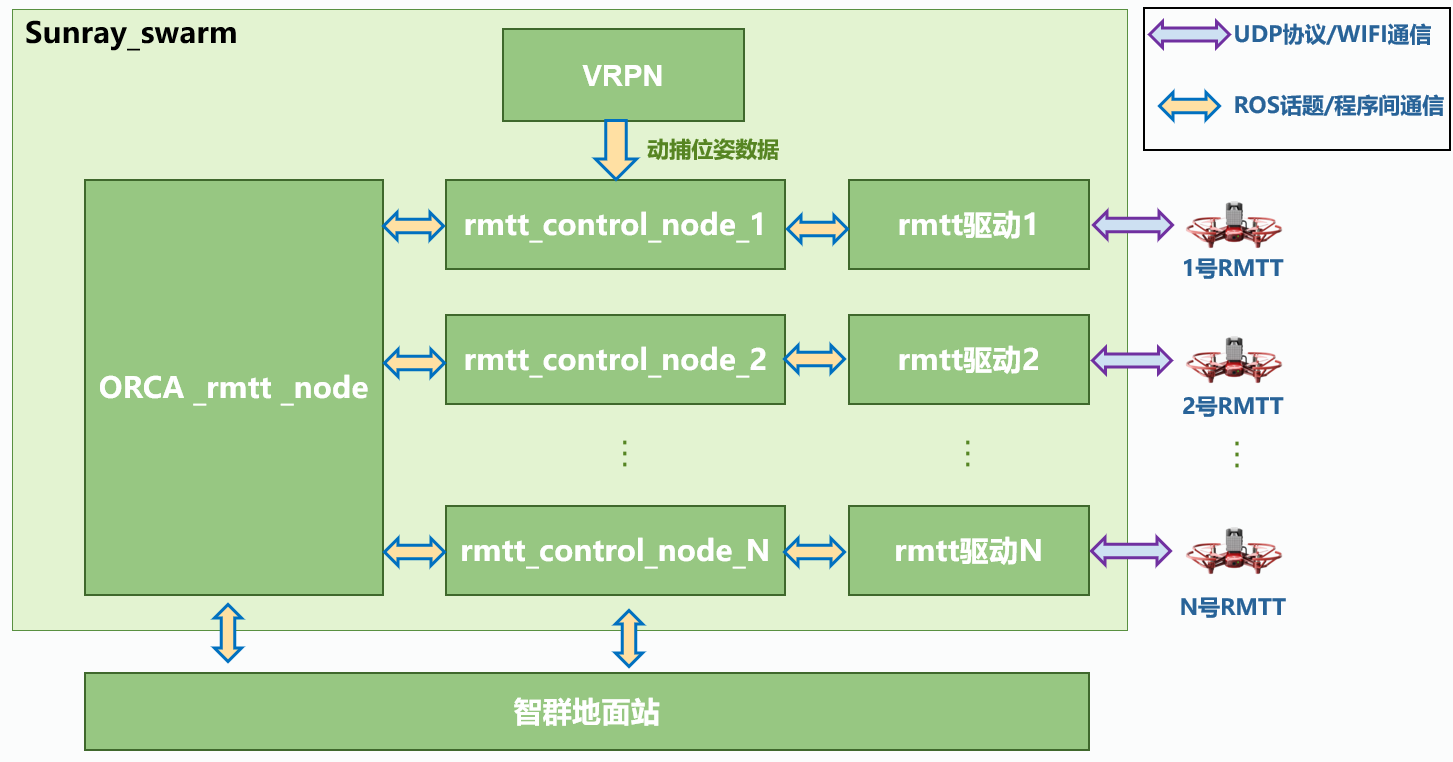
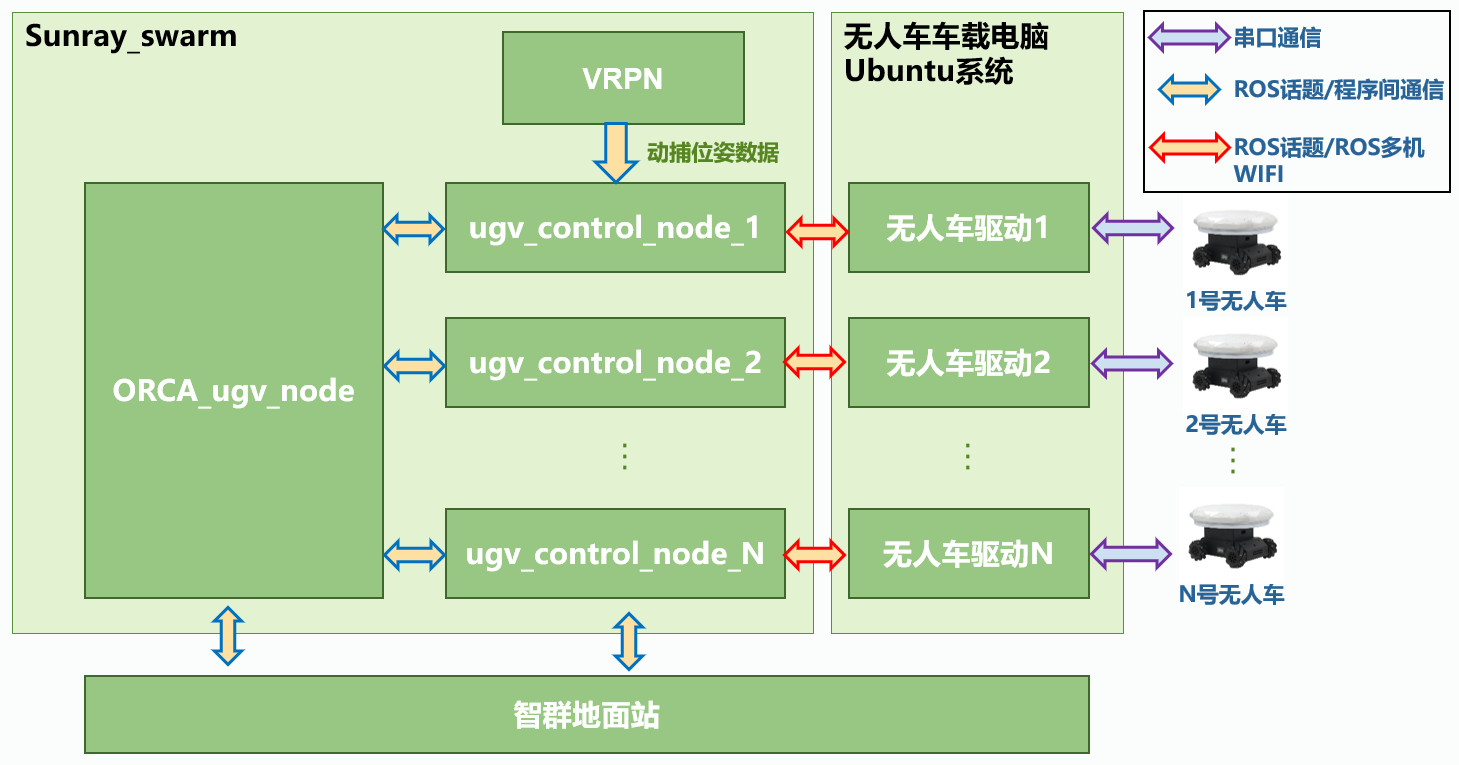
- 智群地面站运行在开发主机中,通过ROS与Sunray_swarm模块进行通信;
Sunray_swarm绿色框线内的所有程序均实时运行在ubuntu系统中,内部每一个绿色方框代表一个程序节点VRPN节点为共用节点,提供无人机及无人车的位姿数据ORCA_rmtt_node及ORCA_ugv_node为无人机及无人车ORCA集群避障算法节点,是两个独立节点rmtt_control_node节点为无人机控制程序,该程序将起飞、降落、悬停、惯性系移动等指令计算为速度控制指令发送至rmtt驱动节点rmtt驱动节点为驱动无人机的底层驱动程序,该程序通过配置好的SN号、无人机IP与指定的RMTT无人机建立连接ugv_control_node节点为无人车控制程序(运行在无人车车载电脑中),该程序将起飞、降落、悬停、惯性系移动等指令计算为速度控制指令发送至无人车驱动节点无人车驱动节点为驱动无人车的底层驱动程序,该程序通过配置好的串口与无人车底层控制板进行通信,从而控制无人车运动
上一个
Sunray_swarm程序详解
下一个
驱动层程序
最近修改: 2025-04-14
大纲