请输入
菜单
"智群·RMTT"简介
下载
"智群·RMTT"简介
"智群·RMTT"室内多智能体集群编队实验平台的运行包括动作捕捉系统、微小型无人机、麦克纳姆轮无人车、Sunray_swarm(代码)、Sunray_swarm集群地面站(软件)、无线路由器、开发主机组成。
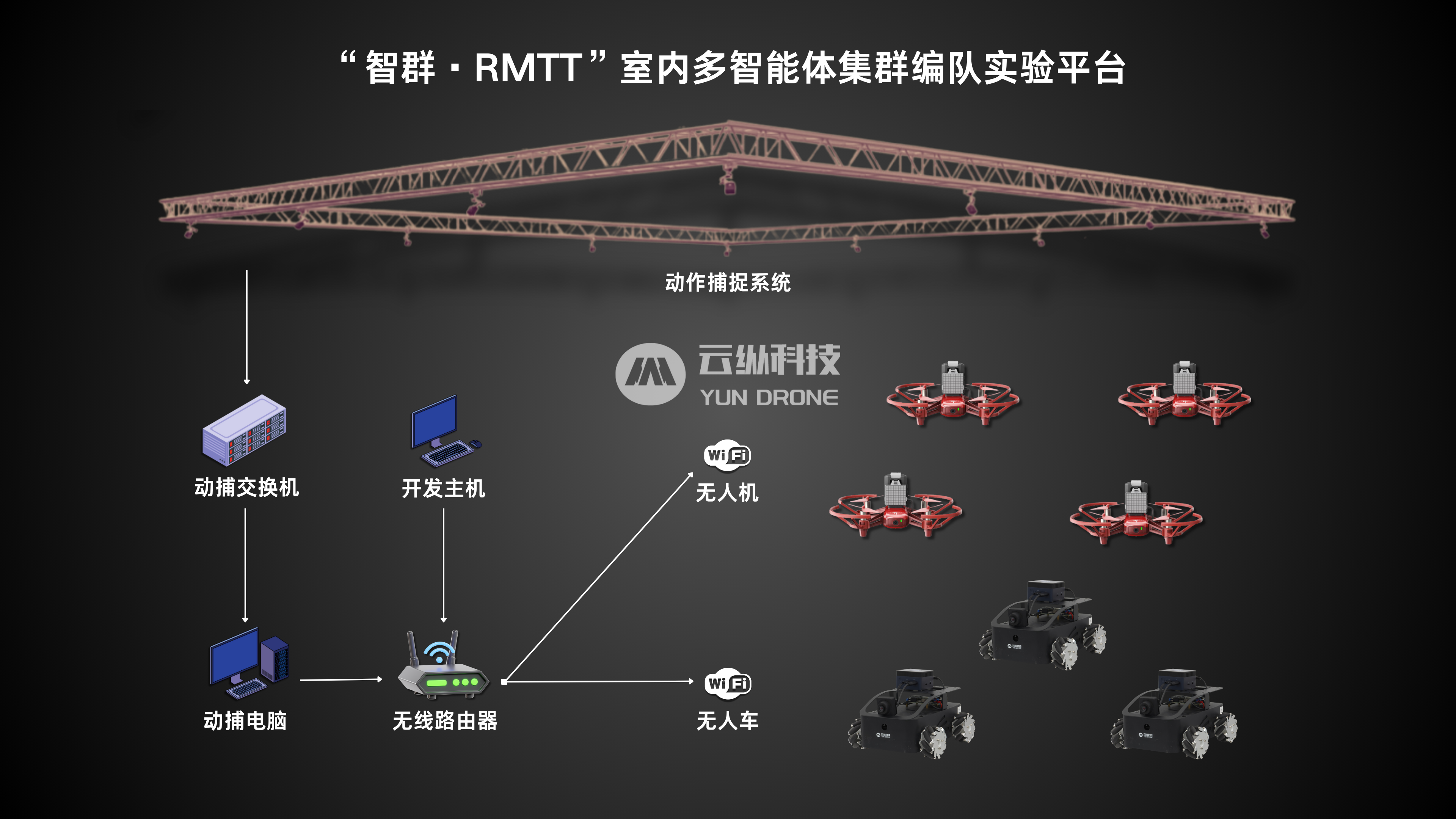
- 动作捕捉系统
- 动作捕捉系统包括动捕镜头、动捕交换机、动捕电脑
- 动捕镜头应当正确安装和调试,确保场地里尽可能多的区域都能够捕捉到无人机的刚体信息(可以手持无人机在区域里行走,确保动捕客户端中刚体不丢失)
- 动捕电脑不需要过高的配置,但是需要双网口,一个网口接动捕交换机获取相机数据,一个网口接路由器广播刚体定位数据
- 动作捕捉系统需要完成场地中的镜头标定和坐标轴设置
- RMTT无人机
- RMTT无人机需粘贴动捕反光球,并在动作捕捉系统中建立对应刚体
- RMTT无人机通过网络配置连接至无线路由器,从而可以与开发主机进行通信
- RMTT无人机的速度环及以下控制程序运行在无人机内部芯片中(非开源),位置环控制、集群控制、避障算法等程序运行在开发主机中(开发主机通过发送速度控制指令控制无人机移动)。因此,RMTT无人机可以理解为一个执行速度控制指令的质点(动力学模型为一阶积分器)
- 无人车
- 无人车需粘贴动捕反光球,并在动作捕捉系统中建立对应刚体
- 无人车平台上方安装了车载电脑,车载电脑默认连接至无线路由器,并通过配置ROS多机与开发主机进行通信
- 无人车的速度环及以下控制程序运行在无人车内部stm32芯片中(非开源),位置环控制程序运行在无人车的车载电脑中,集群控制、避障算法等程序运行在开发主机中
- 无人车是麦克纳姆轮底盘(支持全向移动),因此也可以理解为一个执行控制指令的质点(动力学模型为二阶积分器)
- Sunray_swarm(代码)
- Sunray_swarm是"智群·RMTT"的配套代码,代码全开源,开源网址(欢迎star🌟):https://gitee.com/yundrone_sunray2023/Sunray_swarm
- Sunray_swarm中集成了无人机/无人车驱动模块、控制模块、ORCA集群避障算法、二次开发demo和集群仿真模块
- 用户的二次开发应当在Sunray_swarm中通过修改代码或新增代码实现
- Sunray_swarm集群地面站(软件)
- Sunray_swarm集群地面站是"智群·RMTT"的配套软件,代码闭源
- Sunray_swarm集群地面站可以监听多个无人机/无人车的状态信息,包括智能体ID编号、IP、位置、速度、姿态、电量、文字消息等信息,且支持视频流回传显示
- Sunray_swarm集群地面站可以控制多个无人机/无人车移动,包括Sunray_swarm中提供的所有二次开发接口测试,且支持对DEMO进行配置启动
- Sunray_swarm集群地面站既可以支持真机测试,同样适用于仿真测试
- 无线路由器:
- 路由器作为确保各个实验设备互联互通的通信设备,其性能参数极其重要(注意:能够以网线接入尽量选择网线接入,因为有线连接远比无线连接稳定可靠)
- 动捕电脑通过有线方式接入路由器局域网
- 开发主机通过有线方式接入路由器局域网
- RMTT无人机通过自身网卡无线接入路由器局域网
- 无人车通过自身车载电脑的网卡无线接入路由器局域网
- 应当确保路由器放置在没有被过多遮挡的区域
- 应当确保实验室内部没有太多其他相同通信频段的干扰
- 对于通信情况,可以善用
ping 192.168.1.xx指令进行定量测试,保证各个局域网节点间无丢包,延迟在15ms以内
- 路由器作为确保各个实验设备互联互通的通信设备,其性能参数极其重要(注意:能够以网线接入尽量选择网线接入,因为有线连接远比无线连接稳定可靠)
- 开发主机:
- 开发主机是一台PC,可以是笔记本也可以是台式机
- 开发主机中预装Ubuntu2004操作系统及ROS,预装Sunray_swarm代码和Sunray_swarm地面站
上一个
使用前必读
下一个
产品发货清单
最近修改: 2025-04-14
大纲