请输入
菜单
智群地面站界面说明
下载
智群地面站界面说明

标注1: 智能体连接
- 第一行用于选择智能体类型:RMTT代表无人机、UGV代表无人车,数字代表连接成功智能体数量。
- 第二行用于选择智能体的编号。
- 按钮选中时字体为蓝色,未选中为白色字体。
- 当智能体连接成功时对应智能体按钮会变绿色,默认为灰色。如下图所示,UAV1、UAV2、UAV3、UAV4、UAV5、UAV6连接成功,UAV7、UAV8号没有连接。

标注2: 智能体状态
- 订阅来自智能体控制节点发布的智能体状态话题和ORCA算法节点发布的ORCA算法状态话题,显示当前的智能体的基本状态和集群状态。
C++
## 以无人机为例,X为选中的智能体序号 /sunray_swarm/rmtt_X/agent_state /sunray_swarm/rmtt_X/agent_orca_state - 自定义消息
sunray_msgs::agent_state包含了智能体ID(agent_id)、智能体电量(battery)、智能体IP地址(agent_ip)、智能体定位数据(odom_valid)、底层驱动(connected)、智能体位置(pos)、速度(vel)、姿态(att)、智能体当前执行的控制状态(control_state)、底层指令(cmd_vel),具体内容请参考agent_state.msg文件中的定义。- 执行仿真时,智能体电量显示为101%。
- 自定义消息
sunray_msgs::orca_state包含了ORCA算法的ORCA指令(orca_cmd)、集群数量(agent_num)、原点坐标(home_pos&home_yaw)、当前目标点(goal&yaw)、ORCA算法计算的期望速度(vel_orca)、当前智能体是否抵达目标点(arrived_goal)、全部智能体是否抵达目标点(arrived_all_goal),具体内容请参考agent_state.msg文件中的定义。
标注3: 智能体视频流
- 订阅智能体发布的相机话题并显示。
## 无人机相机话题(X为编号) /sunray_swarm/rmtt_X/image_raw/compressed ## 无人车相机话题(X为编号) /sunray_swarm/ugv_X/camera/image/compressed - 受到通信带宽的限制,视频显示可能存在延迟和卡顿。
标注4:智能体控制
- 此处控制仅针对在标注1区域中选中的单个无人机或无人车。
- 通过点击不同的控制按钮来实现对单个智能体的单独控制,即地面站发送对应话题至对应的智能体控制节点:
## 无人机控制话题(X为编号) /sunray_swarm/rmtt_X/agent_cmd ## 无人车控制话题(X为编号) /sunray_swarm/ugv_X/agent_cmd - 自定义消息
sunray_msgs::agent_cmd与控制按钮的对应关系:单机起飞(sunray_msgs::agent_cmd::TAKEOFF)、单机降落(sunray_msgs::agent_cmd::LAND)。 - ⚠️注意:发送惯性系位置控制(
sunray_msgs::agent_cmd::POS_CONTROL)、机体系位置控制(sunray_msgs::agent_cmd::VEL_CONTROL_BODY)及惯性系速度控制(sunray_msgs::agent_cmd::VEL_CONTROL_ENU)指令时注意数值单位。
标注5:智能体集群控制
- 此处控制仅针对在标注1区域中选中的智能体类型。
- 一键起飞,一键降落,一键悬停和一键停止按钮优先级最高,当要结束这种被接管状态时,需要点击停止接管,解除接管控制,才能继续demo控制。
- 通过点击不同的控制按钮来实现对不同类型的智能体控制,即地面站发送对应话题至对应的智能体控制节点:
## 无人机控制话题 /sunray_swarm/rmtt_gs/agent_cmd ## 无人车控制话题 /sunray_swarm/ugv_gs/agent_cmd - 自定义消息
sunray_msgs::agent_cmd与控制按钮的对应关系:一键起飞(sunray_msgs::agent_cmd::TAKEOFF)、一键降落(sunray_msgs::agent_cmd::LAND)、一键悬停(sunray_msgs::agent_cmd::HOLD)、单机悬停(sunray_msgs::agent_cmd::HOLD)。 - ⚠️注意:一键起飞、一键降落及一键悬停按钮针对所有在线的无人机智能体。
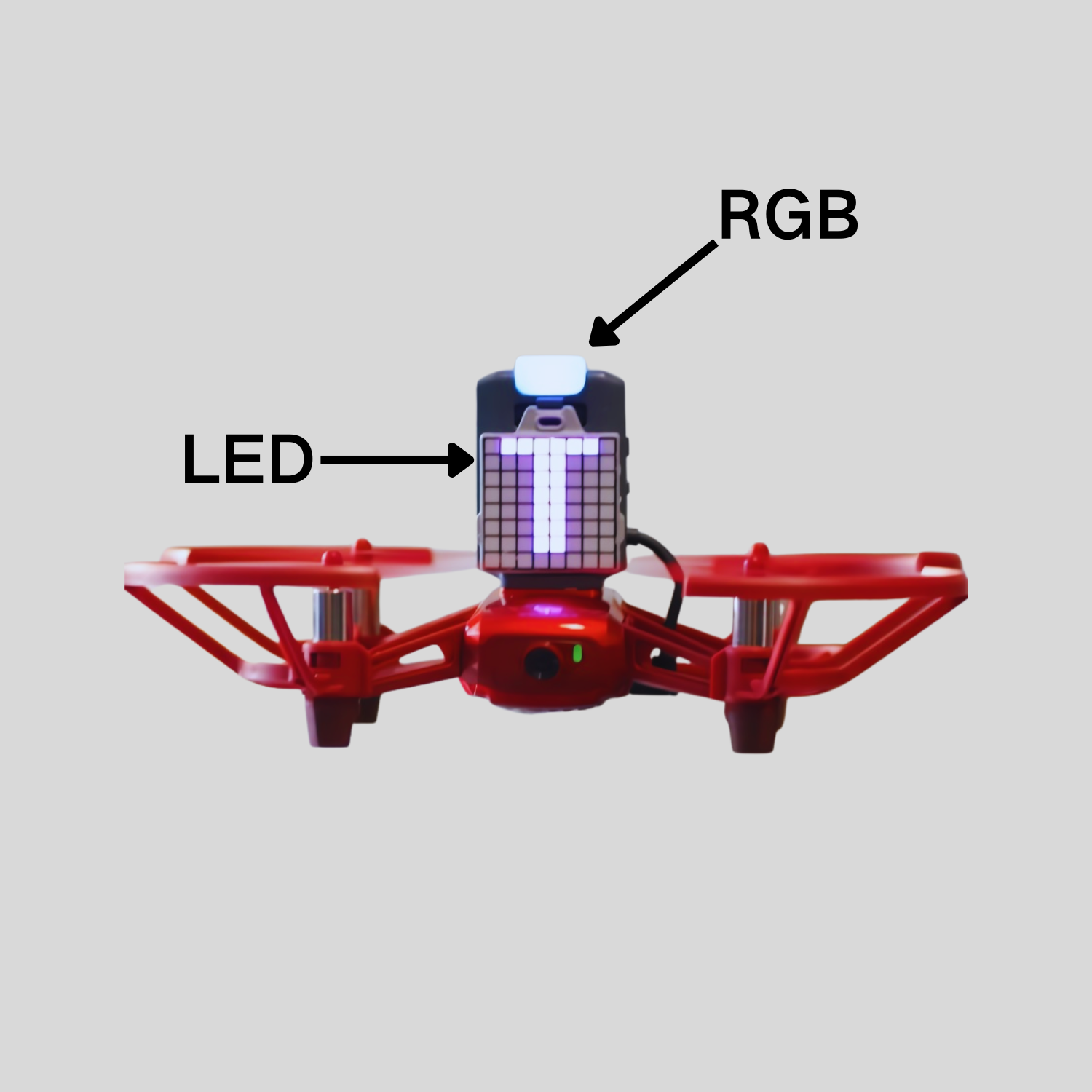
- LED设置、RGB设置按钮可以设定RMTT的LED和RGB灯。
标注6、标注7、标注8:智能体平面地图
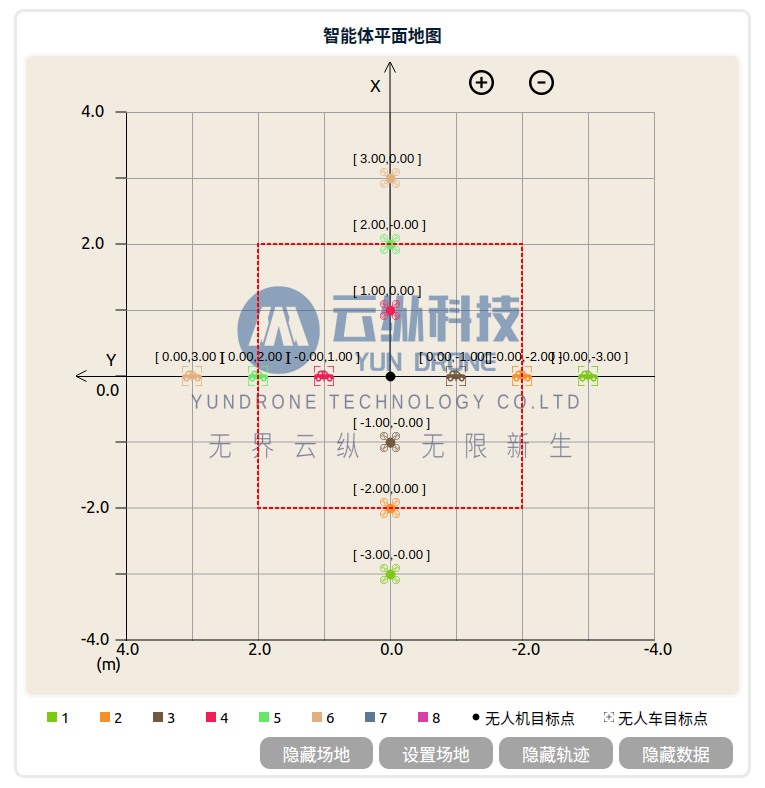
- “+”按钮用于缩小地图,“-”按钮用于放大地图。
- 倒数第二行为智能体ID及其对应颜色。
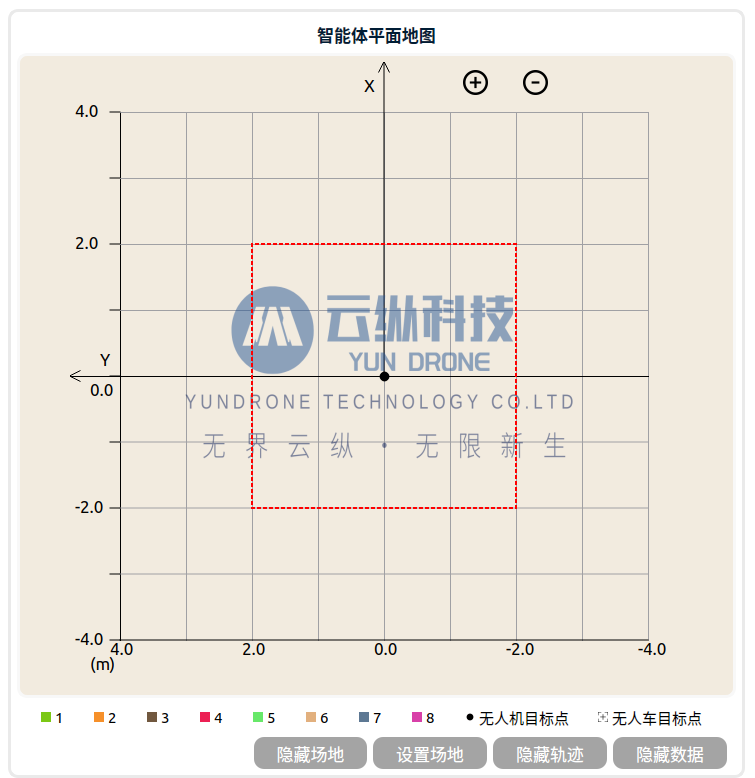
- 显示/隐藏场地按钮用于切换地图场地大小的显示和隐藏,显示/隐藏轨迹按钮用于切换地图里智能体的轨迹显示与隐藏,显示/隐藏数据按钮用于切换智能体的坐标数据的显示与隐藏,默认是隐藏状态。
- 设置场地按钮可以用辅助显示地理围栏大小,红线表示显示场地范围:
标注9:一键启动

- 一键启动对应的解释:(鼠标移动到❓附近会弹出对应的demo提示)
- 一键启动无人机:运行uav.sh脚本,启动无人机真机相关的launch文件。
- 单车单机RVIZ仿真:运行single_rviz_sim.sh脚本,启动单机单车RVIZ仿真相关的launch文件。
- 单机单车Gazebo仿真:运行single_gazebo_sim.sh脚本,启动单机单车Gazebo仿真相关的launch文件。
- 一键启动无人车:运行ugv.sh脚本,启动无人车真车相关的launch文件。
- 集群RVIZ仿真:运行rviz_simulation.shh脚本,启动集群RVIZ仿真相关的launch文件。
- 集群Gazebo仿真:运行gazebo_simulation.sh脚本,启动集群Gazebo仿真相关的launch文件。
标注9:ORCA指令
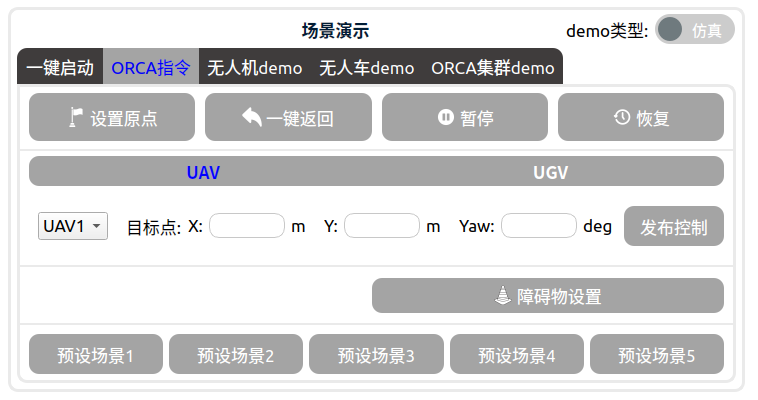
-
发布ORCA控制指令,无人机/无人车在线,就会对对应的ORCA模块发布控制指令,对应的话题为:
## 无人机ORCA控制指令 /sunray_swarm/rmtt/orca_cmd ## 无人车ORCA控制指令 /sunray_swarm/ugv/orca_cmd -
自定义消息
sunray_msgs::orca_cmd与控制按钮的对应关系:设置原点(sunray_msgs::orca_cmd::SET_HOME)、一键返回(sunray_msgs::orca_cmd::RETURN_HOME)、设置障碍物(sunray_msgs::orca_cmd::SETUP_OBS)、预设场景1(sunray_msgs::orca_cmd::ORCA_SCENARIO_1)、预设场景2(sunray_msgs::orca_cmd::ORCA_SCENARIO_2)、预设场景3(sunray_msgs::orca_cmd::ORCA_SCENARIO_3)、预设场景4(sunray_msgs::orca_cmd::ORCA_SCENARIO_4)、预设场景5(sunray_msgs::orca_cmd::ORCA_SCENARIO_5)。 -
选中智能体输入目标点数据,发布控制,就会发送目标点数据到对应的智能体,对应的话题为:
## 无人机控制话题(X为编号) /sunray_swarm/rmtt_X/goal_point ## 无人车控制话题(X为编号) /sunray_swarm/ugv_X/goal_point -
障碍物设置按钮按下后,弹出障碍物设置弹窗:
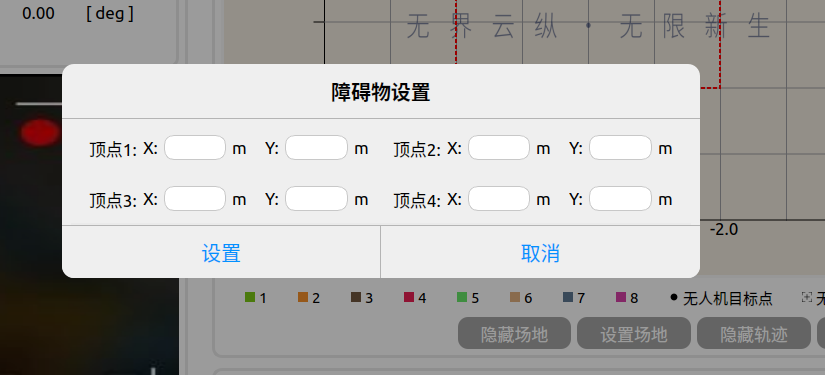
障碍物设置弹窗 - 自定义消息
sunray_msgs::orca_cmd与障碍物设置的对应关系:、设置障碍物(sunray_msgs::orca_cmd::SETUP_OBS)。
- 自定义消息
标注9:启动无人机demo程序

- demo类型:用于切换demo的类型,仿真还是真机。
- 无人机demo对应的解释:(鼠标移动到❓附近会弹出对应的demo提示)
- 悬停控制:无人机一键起飞,并在指定位置悬停。
- 航点控制:无人机按照指定的离散航点依次飞行。
- 圆形轨迹追踪控制:无人机按照指定的圆形轨迹移动。
- 无人机跟随无人车:无人机通过读取无人车位置来跟随无人车移动。
标注9:启动无人车demo程序

- 按钮定义同上(仅改变了智能体类型)。
标注9:ORCA集群demo程序

- 圆形轨迹追踪控制(无人机):集群无人机按照指定的圆形轨迹移动,无人机均匀分布在圆形轨迹上。
- 8字轨迹追踪控制(无人机):集群无人机按照指定的 8字轨迹移动,无人机均匀分布在轨迹上。
- 固定阵型变换控制(无人机):集群无人机按照预设的阵型自由切换,阵型包括:一字型、三角型、方型等。
- 领从编队阵型控制(无人机):集群无人机依据预设的阵型偏移量围绕leader展开,leader的移动轨迹可自由指定,folower跟随移动。
- 圆形轨迹追踪控制(无人车):集群无人车按照指定的圆形轨迹移动,无人车均匀分布在圆形轨迹上。
- 8字轨迹追踪控制(无人车):集群无人车按照指定的 8字轨迹移动,无人车均匀分布在轨迹上。
- 固定阵型变换控制(无人车):集群无人车按照预设的阵型自由切换,阵型包括:一字型、三角型、方型等。
- 领从编队阵型控制(无人车):集群无人车依据预设的阵型偏移量围绕leader展开,leader的移动轨迹可自由指定,folower跟随移动。
标注10: 节点列表

- 每3秒刷新一次在线节点显示
标注10: 文字消息框
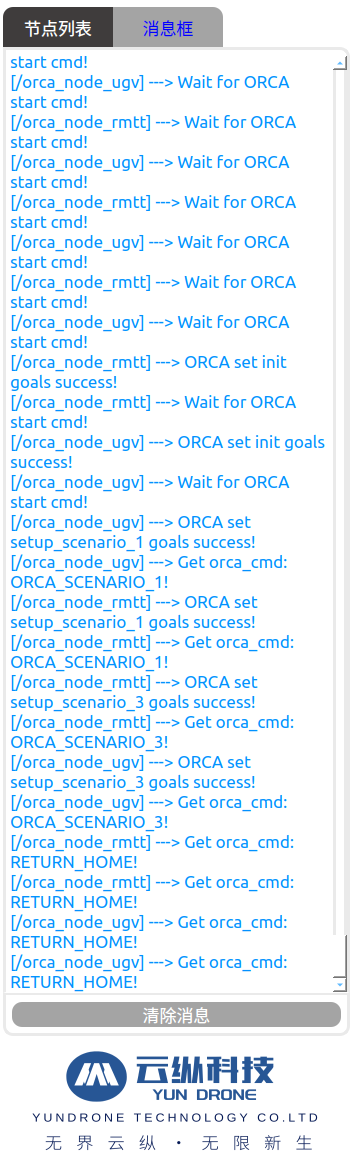
-
订阅并显示显示Sunray_sawrm各个程序回传的文字消息,对应话题:
/sunray_swarm/text_info
上一个
智群地面站安装
下一个
仿真及真机实验手册
最近修改: 2025-09-20
大纲