请输入
菜单
简易避障
下载
本篇内容:基于双目视觉定位,利用地面站运行简易避障脚本,控制无人机自主避障
在Sunray/General_Module/sunray_tutorial中配置了简易避障的示例demo:解锁、起飞后,通过地面站发送目标点,无人机会使用水平速度+高度位置+偏航角速度控制朝着目标点飞行并利用深度图实时避障。
运行示例前需要完成双目视觉定位的飞行测试
运行示例
- 打开地面站连接无人机,连接方法参照Sunray地面站使用说明中的连接智能体功能。
- 通过地面站添加机载电脑中的demo_simple_obstacle_avoidance_viobot.sh和kill_node_viobot.sh脚本。添加方法参照Sunray地面站使用说明中的脚本配置功能,脚本类型选择真机。该脚本会在机载电脑中启动如下所述的4个ROS Launch文件:
bash
# 用于启动MAVROS节点,建立机载电脑与飞控的通信连接
roslaunch sunray_uav_control sunray_mavros_exp.launch;
# 用于启动外部定位节点,将外部定位数据(此处是Viobot2的里程计结果)发送给飞控
roslaunch sunray_uav_control external_fusion.launch external_source:=4 position_topic:=/baton/stereo3/odometry enable_rviz:=false use_vision_pose:=false
# 用于启动Sunray控制节点,将相关控制指令发送给飞控
roslaunch sunray_uav_control sunray_control_node.launch;
# 用于启动简易避障节点
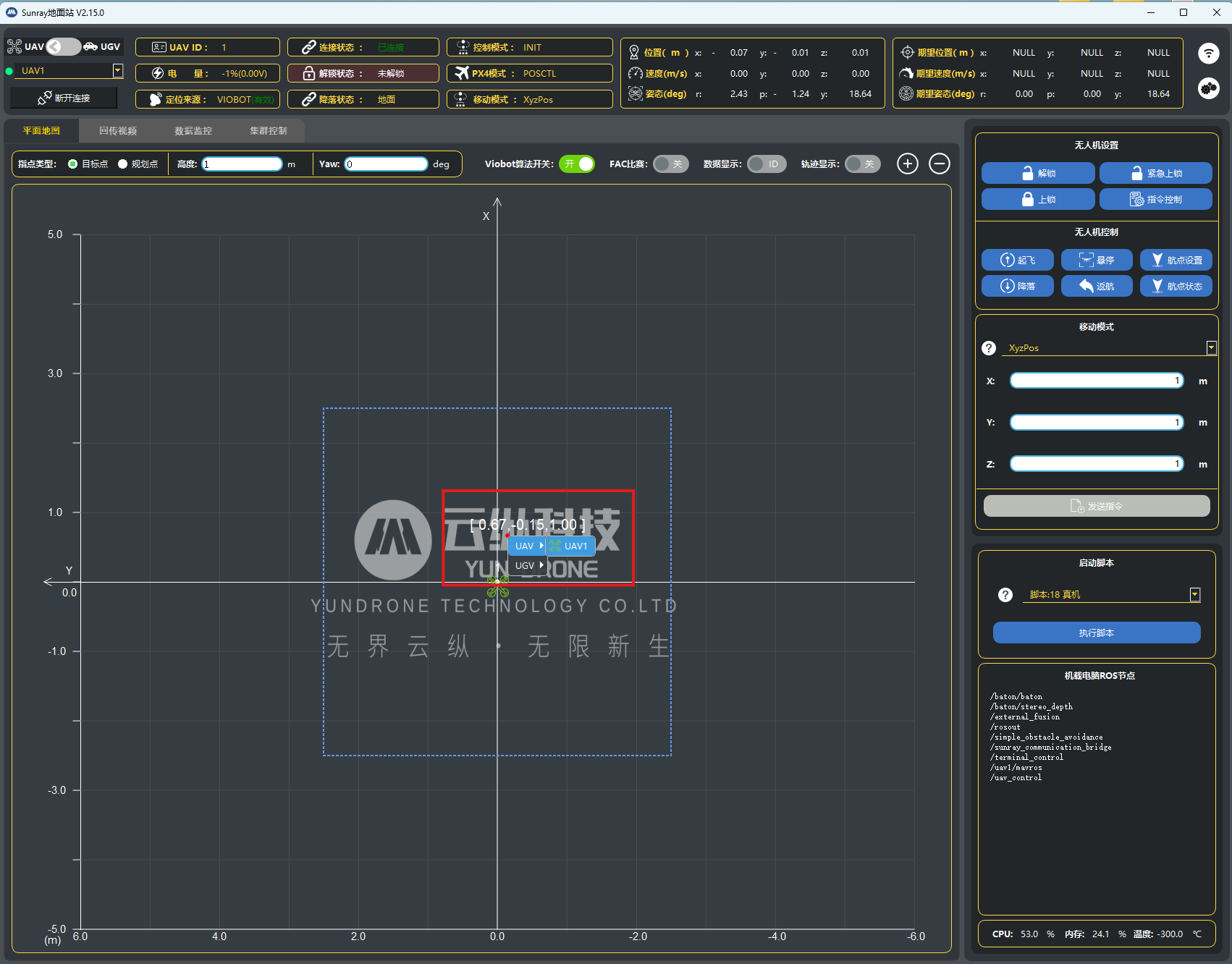
roslaunch sunray_tutorial simple_obstacle_avoidance.launch- 选择demo_simple_obstacle_avoidance_viobot.sh脚本并点击执行脚本,等待一会查看无人机的状态是否处于下图所示。

- 等待无人机起飞后,将指点类型切换到规划点,并在地面站的平面地图中设置目标点。观察无人机是否有向目标点移动并进行避障。
- 点击返航,无人机可返回起飞点位置附近。
- 选择kill_node_viobot.sh脚本并点击**执行脚本。
深度图在10cm以内具有盲区,所以当无人机太靠近障碍物时,避障会失效。
上一个
示例程序测试
下一个
目标检测
最近修改: 2025-10-13
大纲