PX4简介及飞行模式介绍
PX4常用网站
-
PX4官网
-
PX4代码仓库:
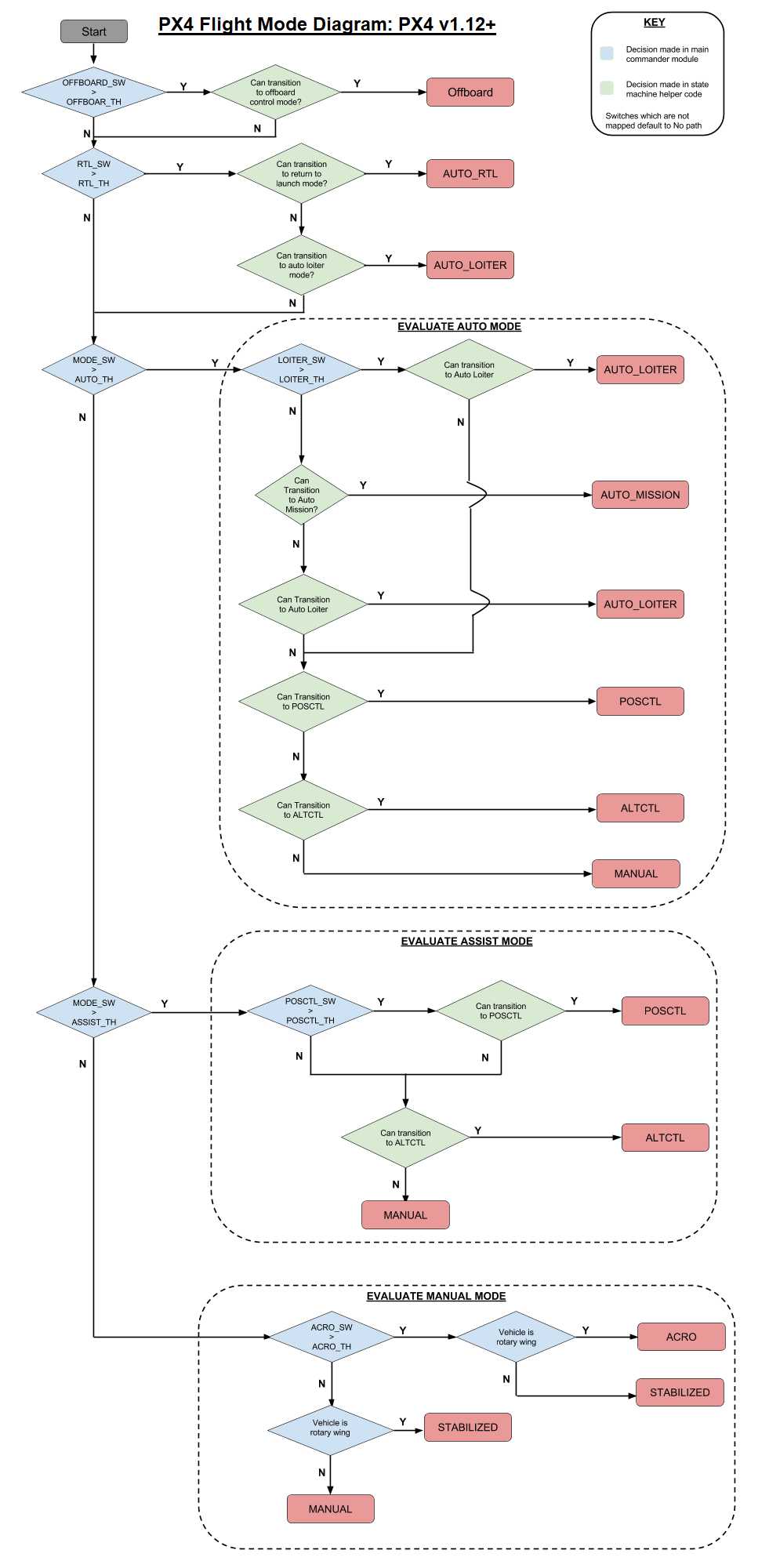
PX4飞行模式介绍
-
对于室内动捕飞行的客户,掌握一下几个模式即可
- 自稳模式(Stabilize mode)
- 定高模式(Altitude mode)
- 定点模式(Position mode)
- 板外模式(Offboard mode)
-
自动模式
-
Takeoff(起飞)
无人机自动爬升到指定高度(在QGC可设置这个高度参数)后切换到Hold(保持)模式
-
Return(返航)
无人机自动上升,到达指定高度后向着home点(一般为解锁点也可通过程序修改或重新指定)飞行并且降落锁定
-
Land(降落)
无人机在当前位置降落锁定
-
Mission(航点任务)
无人机根据上传的地面任务(可通过地面站等预设上传任务)进行一系列的自动任务,包括解锁、起飞、飞往某个点、返航、降落等
-
Hold(保持)
无人机在当前位置悬停并保持其位置和高度
-
-
手动模式
-
Stabilized(姿态模式)
方向摇杆松开回中时(油门摇杆除外)无人机将恢复机头姿态为水平(不包含位置与高度),无人机仍然受惯性或外力移动,高度与位置需要通过遥控器不断调整,油门最低点处解锁,轻推油门无人机螺旋桨转速将不断提高
- 注:如果无人机本身重心不稳,在该模式下如果没有人在回路控制那么无人机会受到重心影响不断漂移
-
Altitude(定高模式)
油门摇杆回中时,无人机将保持其高度位置,无人机水平位置任然受惯性或外力移动,该模式需要高度数据,解锁后需要将油门推至50%以上 无人机才会向上移动
- 注:进入定高模式要求飞控能够收到高度数据,如定高激光雷达数据
-
Position(定点模式)
所有摇杆回中时,无人机将在当前位置悬停,能够自动抵抗惯性以及外力保持其位置与高度,该模式需要定位数据,包括水平位置以及高度数据,解锁后需要将油门推至50%以上 无人机才会向上移动
- 注:进入定点模式要求飞控能够收到定位数据,如动捕、GPS、SLAM算法等
-
Offboard(板外模式or指令模式)
指令控制模式,无人机将响应外部(如机载电脑)发送的位置、速度、加速度、姿态以及推力/力矩等设定值
- 注1:无人机进入Offboard模式的要求是收到切换模式指令的同时收到外部期望指令设定值(如发送:切换Offborad模式+xyz、yaw设定值),否则无法进入Offboard模式
- 注2:外部期望指令设定值需要循环发送,且不低于一定频率,否则无人机会自动退出Offboard模式
- 注3:那么假设如果发送的是位置期望值,那么也类似于定点模式,要求飞控能够收到定位数据
-
PX4无人机状态
- Sunray-150无人机主要有以下状态:
- ready
无人机在当前模式各项安全检查通过,等待解锁
- not ready
当前模式的某项检查不通过,无法解锁
- armed
无人机已解锁,怠速状态下,无人机将在地面慢速旋转等待油门推动
- disarmed
无人机螺旋桨停止转动
- land
无人机处于降落状态,当检测到已落地后螺旋桨将停止转动