请输入
菜单
MOCAP动捕定位
下载
本篇内容:实现无人机动捕环境定点飞行。
创建刚体
- 将动捕球(反光球)粘贴到无人机上,数量要求大于3颗,注意不要贴成对称形状。
- 将贴好动捕球的无人机放置与动捕环境中,要求无人机机头朝向与动捕坐标X轴对齐,偏差过大可能导致无人机定位不准。
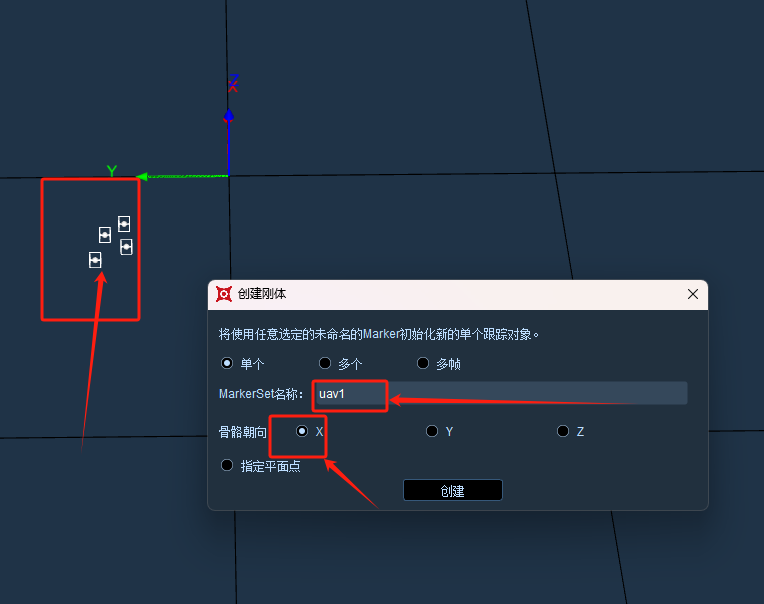
- 打开相关软件,勾选对应marker,创建刚体,刚体朝向选择X轴。(注意:程序中订阅的话题为uav_name拼接uav_id,因此在不改动程序配置的情况下请将刚体名称设置为 uav1。
- 检测动捕软件是都在正常运行与播放。
数据广播
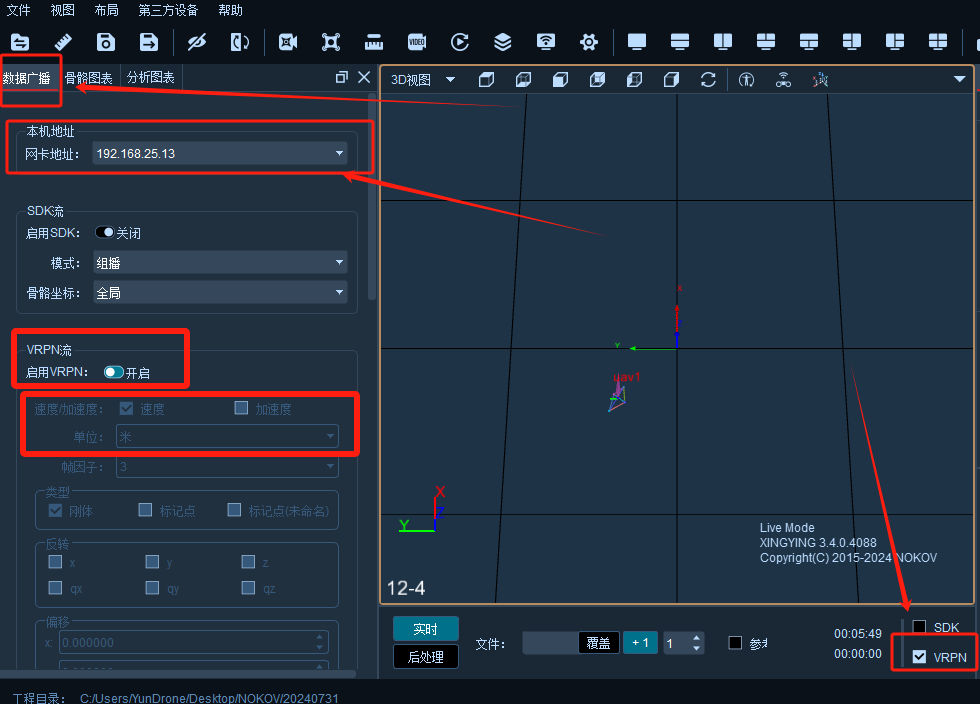
- 检查VRPN数据广播的单位是否为 米,错误的数据单位会引起程序错误。
- 勾选VRPN广播,查看数据广播地址。
- 检查是否成功收到数据。
将位置信息发送到无人机
# 打开终端 启动ros
cd ~/Sunray
roscore
# 启动mavros连接无人机
roslaunch sunray_uav_control sunray_mavros_exp.launch
# 运行外部定位模块
roslaunch sunray_uav_control external_fusion.launch external_source:=3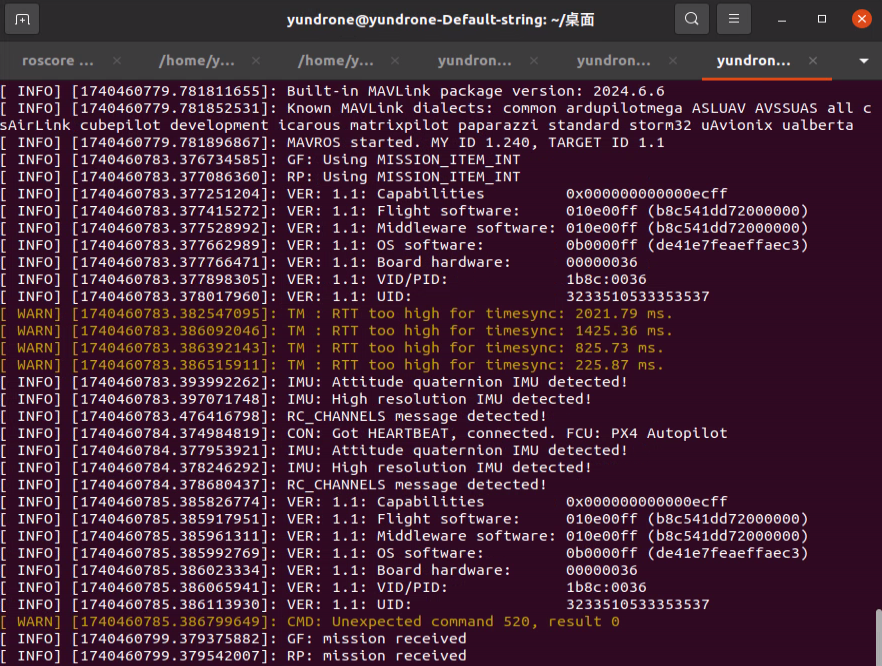
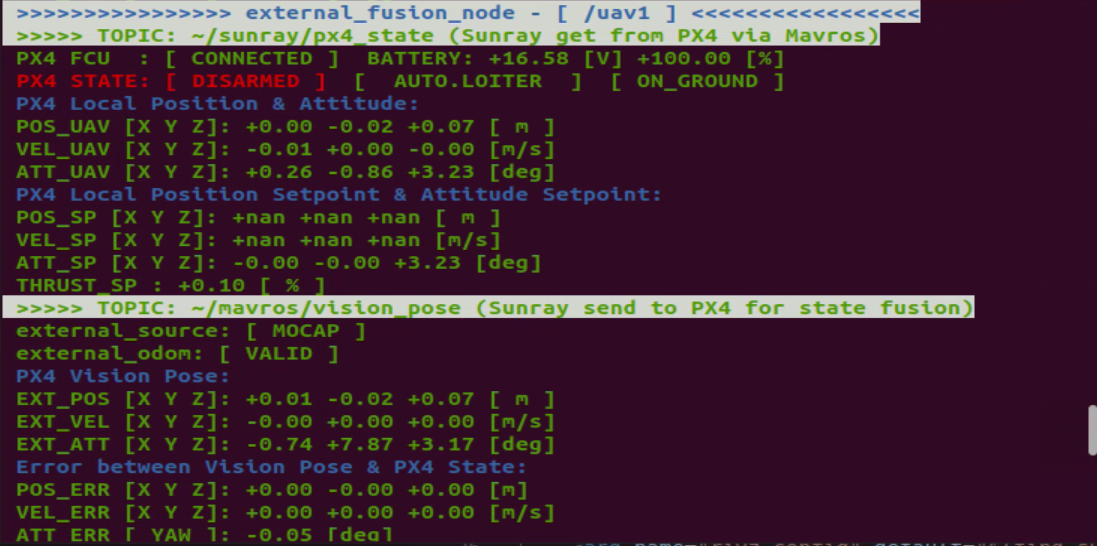
- 以上操作完成了将动捕定位数据发送到无人机用于定位,接下来可以尝试使用遥控器切换到定点/定高模式的手动飞行
- 注意检查ERR POS项是否接近与0 如果差值较大可能存在问题
- 终端会显示无人机的模式和其他状态
过程演示
上一个
外部定位飞行
下一个
指令飞行与控制
最近修改: 2025-09-20
大纲