请输入
菜单
QGC地面站 - 传感器校准
下载
QGC地面站 - 传感器校准
无人机在发货前已进行了所有初始设置,本教程仅用作客户后续重新恢复出厂设置教程。同时,由于无人机长时间放置/PX4开源飞控自身缺陷等原因,无人机会突然出现无法解锁or飞行错误等情况属于偶发现象,需要重新对飞机进行传感器校准或初始设置,可参照本文档。
本文所有设置参考PX4官方手册,感兴趣可移步PX4官方文档
适用场景:全新飞控刷写固件、硬件更换或飞行异常后。
传感器校准注意事项
- 若长时间不使用无人机,建议在下次使用前进行校准
- 传感器校准应当严格按照本指南及QGC的提示进行
- 校准传感器前应当保证仅使用数据线对飞控进行稳定供电
- 校准期间应当保证飞控处于无强干扰环境
- 当无人机飞行异常时应当及时进行校准
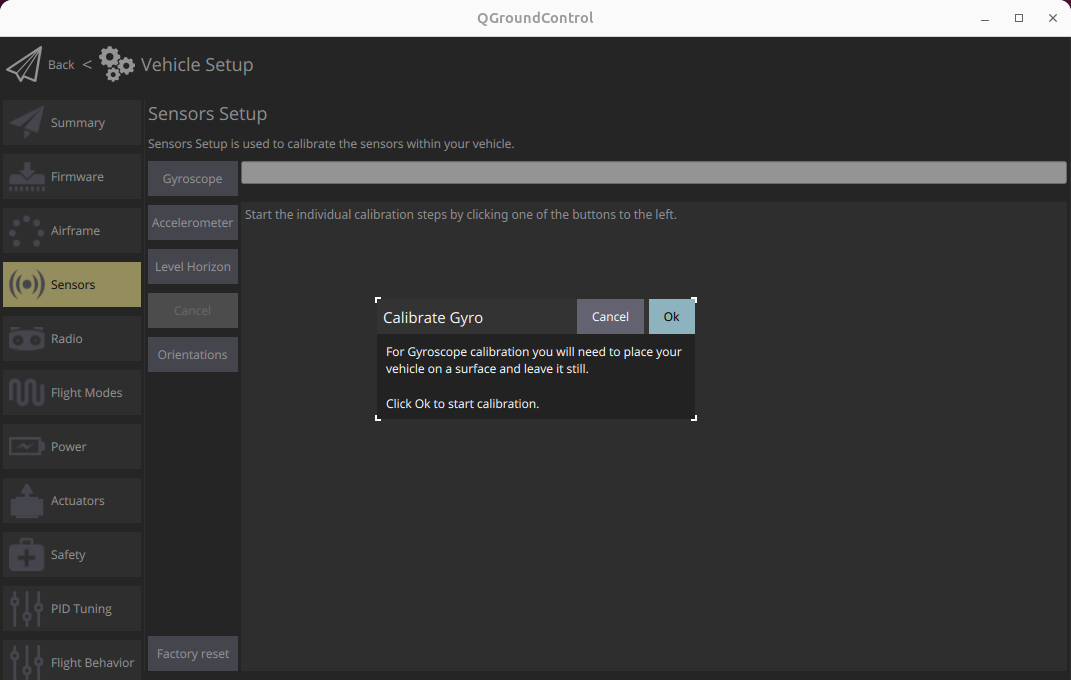
陀螺仪校准
- 保证无人机(飞控)静止,- 点击QGC左上角图标菜单 -> Vehicle Setup -> Sensor -> Gyroscope -> Ok
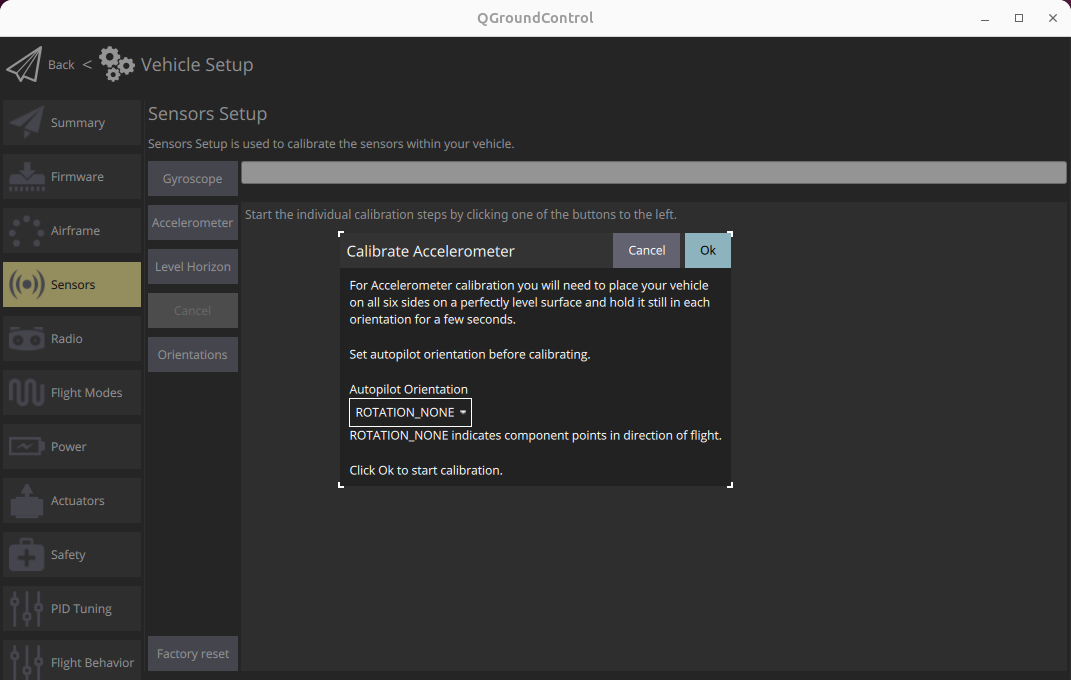
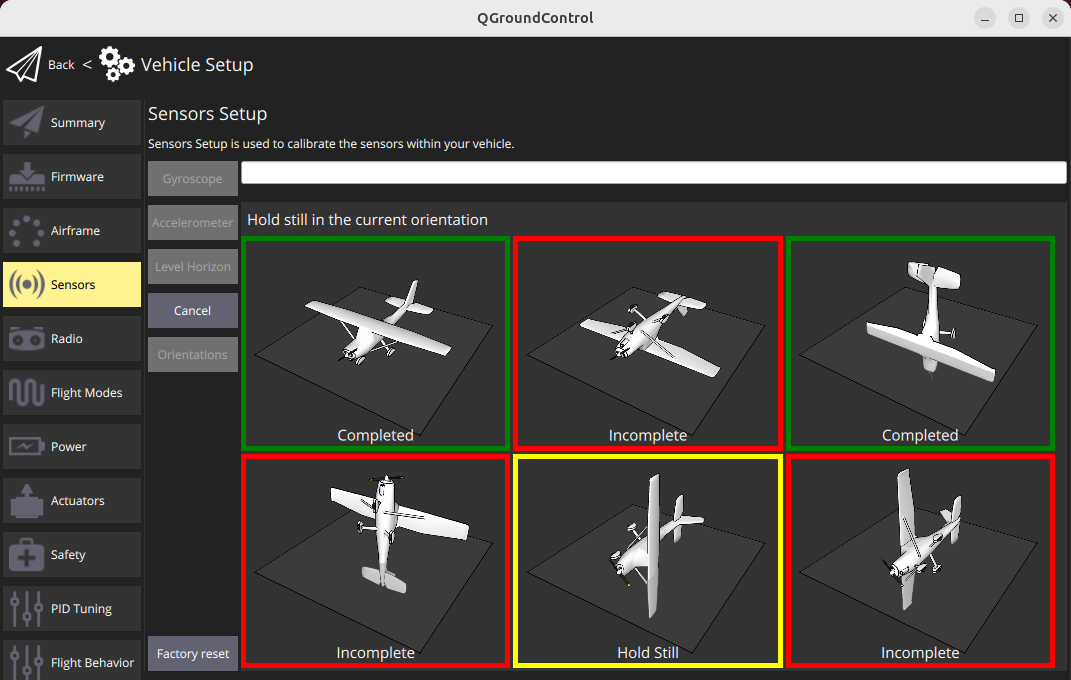
加速度计校准
- 保证无人机(飞控)静止,- 点击QGC左上角图标菜单 -> Vehicle Setup -> Sensor -> Accelerometer -> Ok
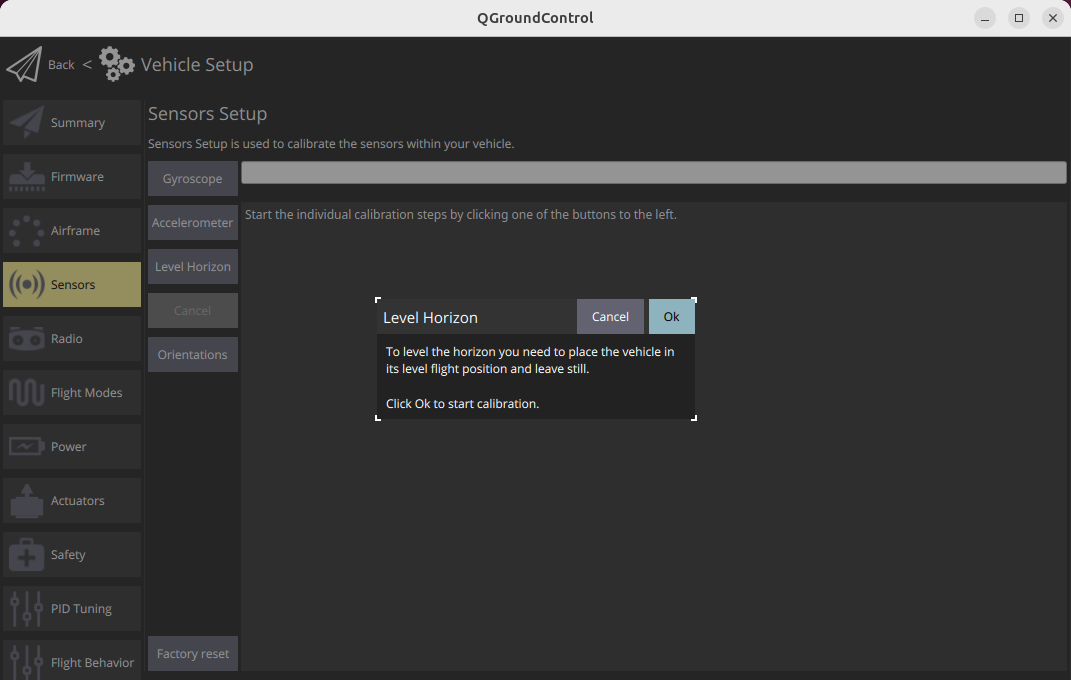
地平线校准
- 保证无人机(飞控)至于水平面,- 点击QGC左上角图标菜单 -> Vehicle Setup -> Sensor -> Level Horizon -> Ok
磁罗盘校准
NXT PX4没有磁罗盘校准选项。
各地地磁数据不尽相同,若地面站提示地磁数据需要校准或起飞前无人机自检不通过,则应当重新校准磁罗盘。
您应当在:远离金属物体、强电磁场的环境内进行校准,这些环境将对磁罗盘产生干扰。
校准后检查 数据检查:校准完成后,应检查磁罗盘的数据是否准确,包括硬磁系数和软磁系数等是否均变为绿色状态或处于正常范围内。
即使不在飞行状态,您都应当尽量避免使无人机靠近强磁场环境。
- 点击QGC左上角图标菜单 -> Vehicle Setup -> Sensor
- 点击“磁罗盘校准” → 按提示绕XYZ轴旋转飞控(需在无磁场干扰环境进行)
- 按照地面站界面所显示的相应摆放飞机的姿态静止1-2秒,图中黄色边框表示飞机进入校准,飞机朝方向旋转,直至下一个方向。

磁罗盘校准 - 校准完成后如下图所示

磁罗盘校准
上一个
QGC地面站 - PX4固件刷写与机型选择
下一个
QGC地面站 - 遥控器校准与飞行模式设置
最近修改: 2025-04-01
大纲