请输入
菜单
QGC地面站 - 遥控器校准与飞行模式设置
下载
QGC地面站 - 遥控器校准与通道设置
无人机在发货前已进行了所有初始设置,本教程仅用作客户后续重新恢复出厂设置教程。同时,由于无人机长时间放置/PX4开源飞控自身缺陷等原因,无人机会突然出现无法解锁or飞行错误等情况属于偶发现象,需要重新对飞机进行传感器校准或初始设置,可参照本文档。
本文所有设置参考PX4官方手册,感兴趣可移步PX4官方文档
适用场景:首次绑定遥控器或更换遥控设备后。
准备工作:
- 使用电池为无人机供电,打开遥控器。
- 确保RadioMaster Pocket遥控器与接收机已对频。如何对频?
- 飞控通过USB数据线或数传链路与QGC连接,确保QGC主界面显示遥控器通道值。
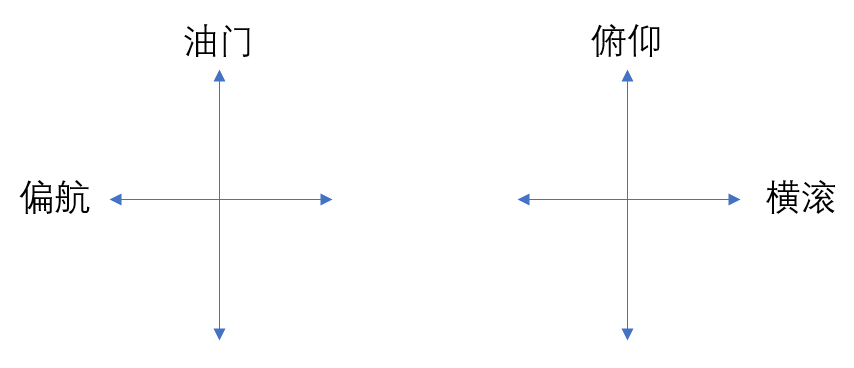
- 本指南使用的遥控器摇杆定义如下所示:
遥控器校准
校准操作
- 点击QGC左上角图标菜单 -> Vehicle Setup -> Radio
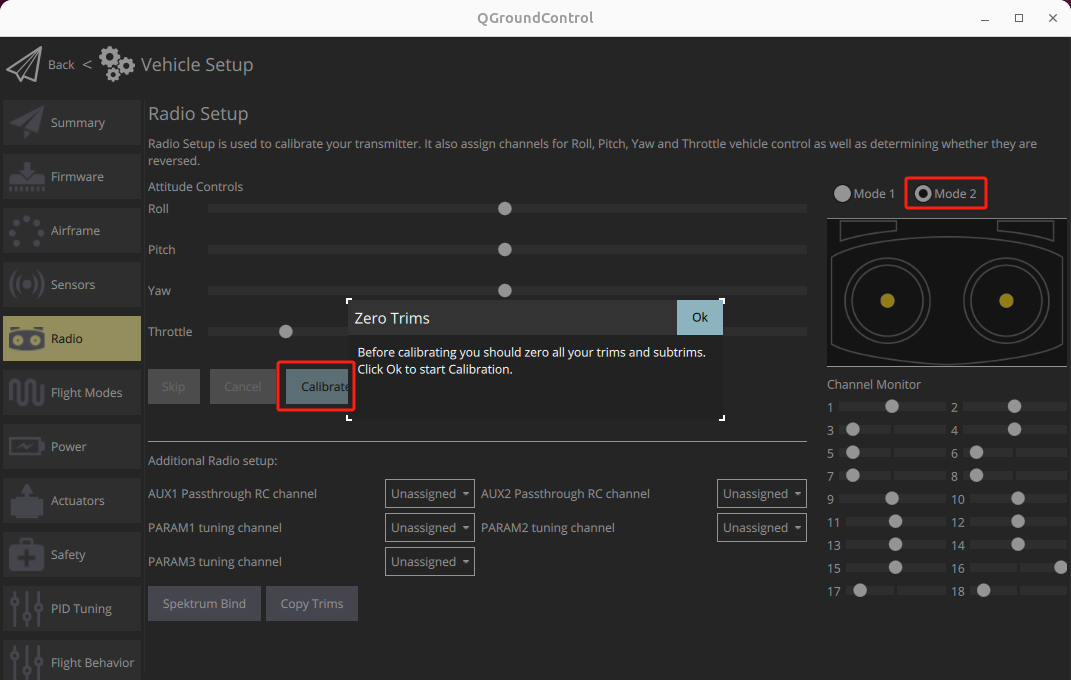
- 确认右上方的摇杆模式为“Mode 2”,将所有开关归零后点击Calibrate -> OK -> Next开始遥控器校准。
- 按右侧摇杆提示将遥控器的对应摇杆推至相应位置的最大行程。
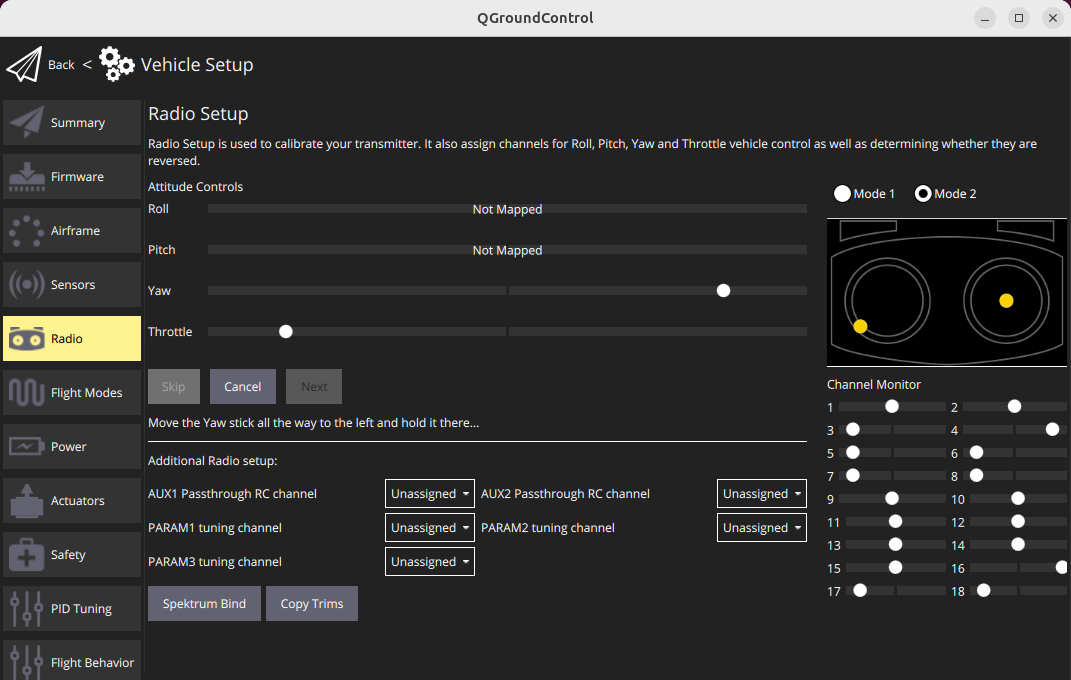
- 完成摇杆校准后将油门拨动到最低位置,连续点击两次“Next”完成校准。
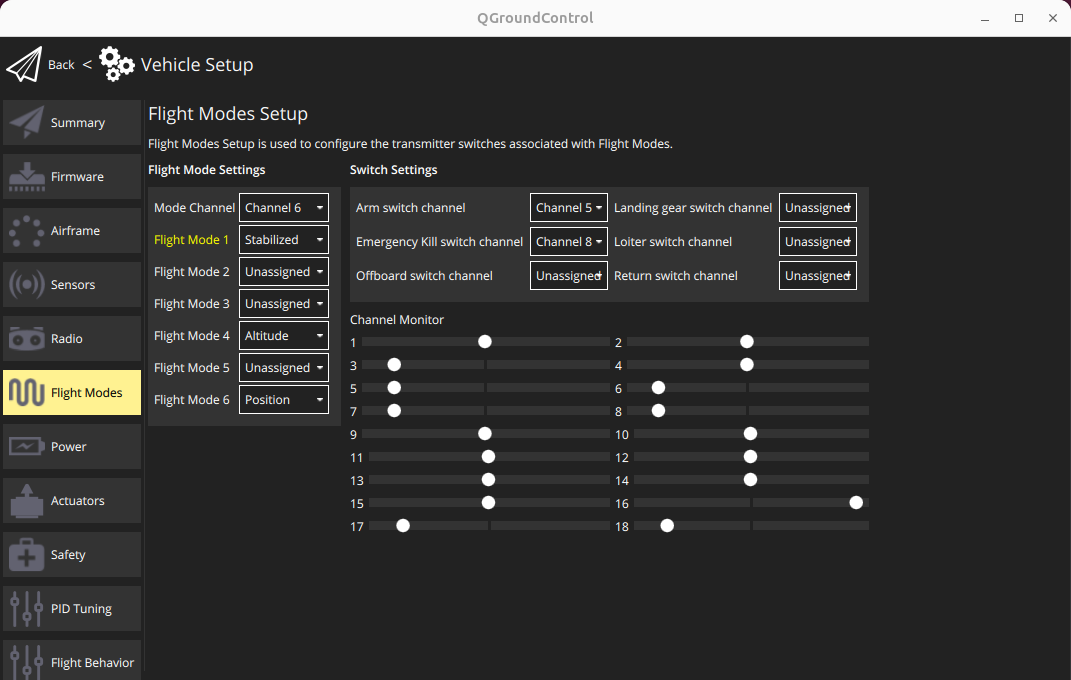
PX4飞行模式设置

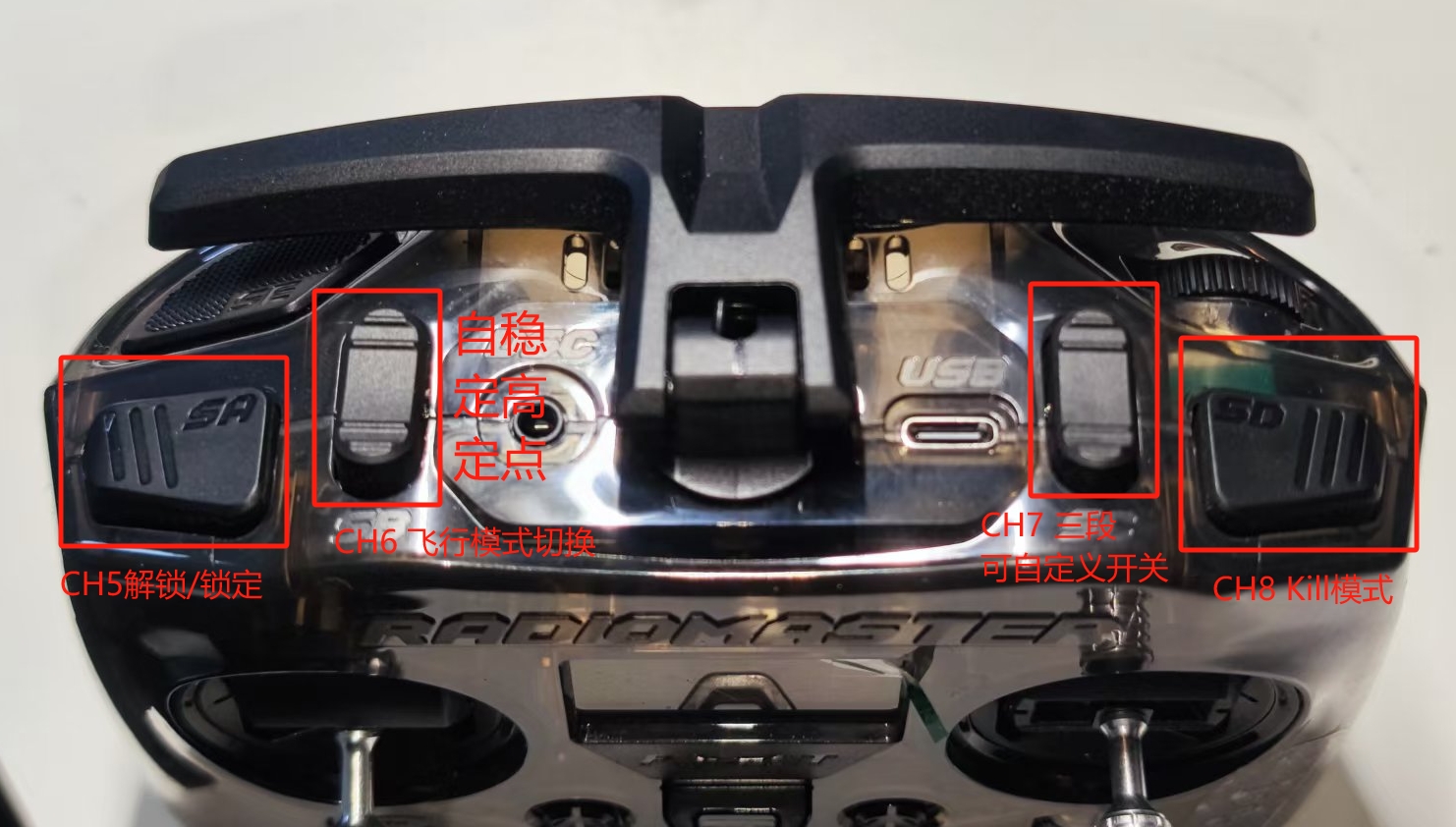
- 5通道(两段开关):解锁飞行器
- 6通道(三段开关):PX4飞行模式切换(建议设置为自稳-定高-定点模式三段)
- 7通道(三段开关):缺省
- 8通道(两段开关):Kill模式(此模式仅限于飞行器故障等特殊情况使用,按下开关飞行器将强行关闭动力)
上一个
QGC地面站 - 传感器校准
下一个
QGC地面站 - 动力系统设置
最近修改: 2025-04-01
大纲