请输入
菜单
目标检测
下载
本篇内容:使用YOLOv7模型结合Viobot2图像实现目标检测
运行示例前需要更改机载电脑中rtsp包的推流地址
- 通过ssh登录到机载电脑
- 在终端输入下列命令进入相关目录
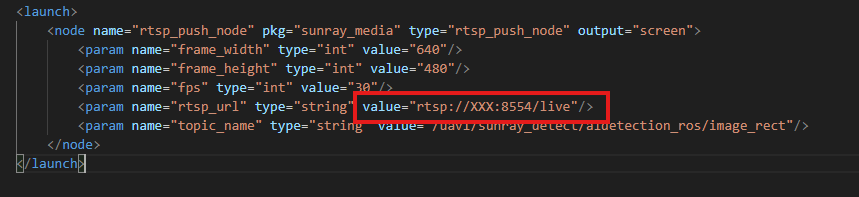
cd Sunray/General_Module/sunray_media/launch/- 通过vim或者其他编辑工具,打开目录中的rtsp_push.launch文件。
- 将rtsp://XXX:8554/live中的XXX改成地面站主机在局域网中的网络IP,如192.168.20.14。
运行示例
- 打开地面站连接无人机,连接方法参照Sunray地面站使用说明中的连接智能体功能。
- 通过地面站添加机载电脑中的demo_detection_viobot.sh脚本。添加方法参照Sunray地面站使用说明中的脚本配置功能,脚本类型选择真机。该脚本会在机载电脑中启动如下所述的2个ROS Launch文件:
bash
# 用于启动目标检测节点,对去畸变后的图像进行检测
roslaunch aidetection_yolov7_ros aidetection_yolov7_viobot.launch
# 用于启动rtsp推流节点,将检测结果图像推流到服务器
roslaunch sunray_media rtsp_push.launch topic:=/uav1/sunray_detect/aidetection_ros/image_rect-
选择demo_detection_viobot.sh脚本并点击执行脚本。
-
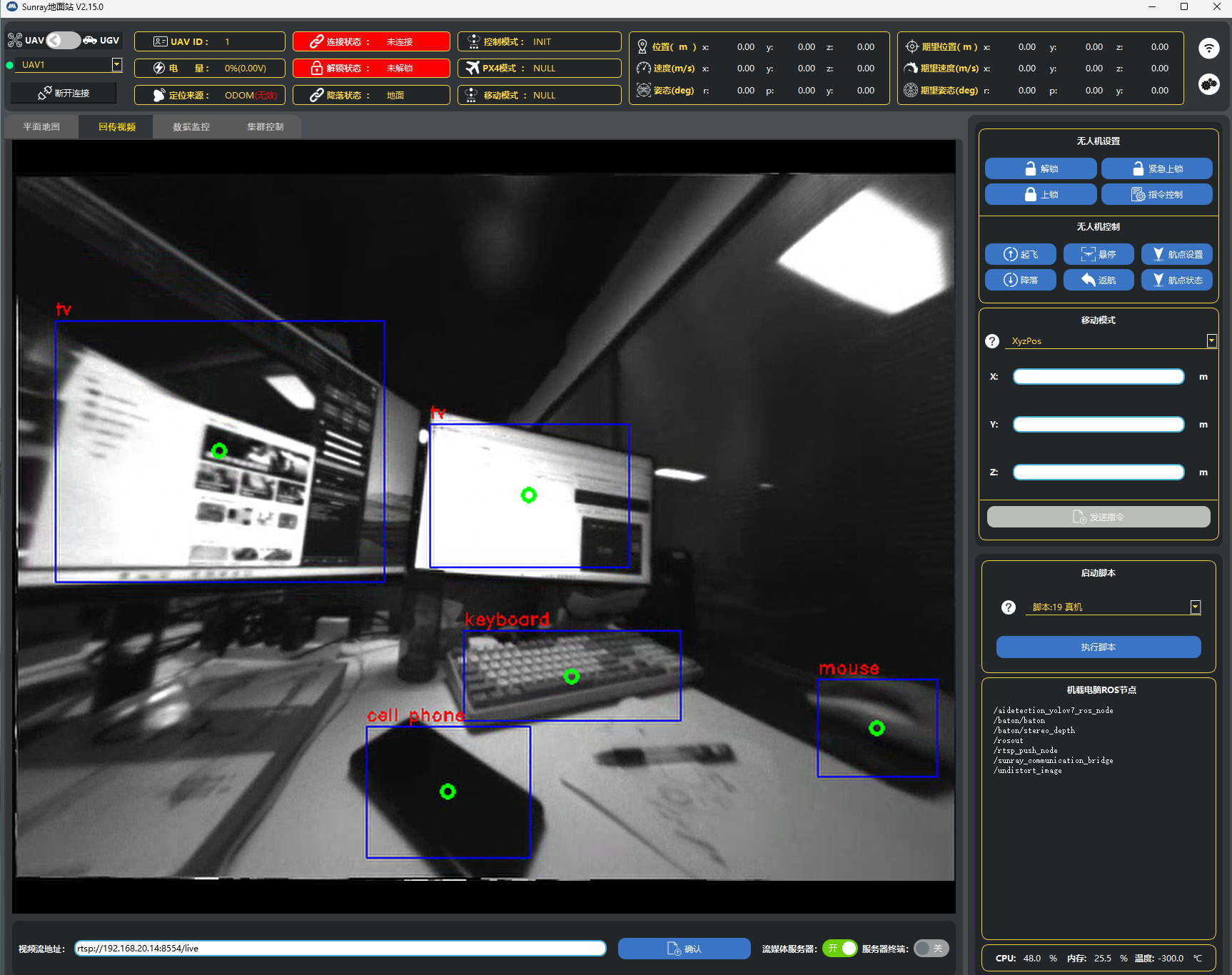
地面站切换到回传视频页面,在视频流地址栏输入rtsp://XXX:8554/live,并点击确定即可看到目标检测输出的图像。这里的XXX需要用地面站主机在局域网中的网络IP替换,如192.168.20.14。
上一个
简易避障
下一个
单目推流
最近修改: 2025-10-13
大纲